Cơ điện tử
Chương 3. Giao diện hệ thống, thiết bị và hệ thống điều khiển

Th3
Chương 2. Cách tiếp cận thiết kế cơ điện tử
Mục lục:
3.1 Giới thiệu
3.2 Các tín hiệu đầu vào của hệ cơ điện tử
3.3 Các tín hiệu đầu ra của hệ cơ điện tử
3.4 Xử lý tín hiệu
3.5 Điều khiển dùng vi xử lý
3.6 Điều khiển số dùng vi xử lý
3.7 Điều khiển vào-ra của bộ vi xử lý
3.8 Điều khiển bằng phần mềm
3.9 Kiểm thử và thiết bị
3.10 Tóm tắt
3.1 Giới thiệu
Mục đích của chương này là nhằm giới thiệu một số vấn đề liên quan đến một hệ cơ điện tử. Mở đầu là tổng quan về các hệ cơ điện tử và các tín hiệu đầu vào và đầu ra của một hệ cơ điện tử. Tiếp theo sẽ giới thiệu về các đặc trưng đầu vào và ra của bộ vi xử lý. Phần mềm, thường ít được chú ý tới trong hệ cơ điện tử, sẽ được trình bày ngắn gọn bằng việc nhấn mạnh các khái niệm kỹ thuật phần mềm. Chương này cũng bao gồm một phần nhỏ về kiểm thử và thiết bị kiểm thử.
Hệ cơ điện tử
Hình 3.1 chỉ ra một hệ cơ điện tử điển hình với các thành phần cơ khí, điện và máy tính. Quá trình thu thập dữ liệu hệ thống bắt đầu với việc đo một đại lượng vật lý bằng một cảm biến. Cảm biến có khả năng tạo ra một số dạng tín hiệu, thường là một tín hiệu tương tự dưới dạng mức điện áp hoặc dạng sóng. Tín hiệu tương tự này được truyền đến bộ biến đổi tương tự-số (ADC). Thông thường, bằng việc sử dụng xấp xỉ liên tiếp, ADC sẽ ánh xạ tín hiệu đầu vào tương tự sang tín hiệu đầu ra số. Giá trị số này bao gồm một tập các giá trị nhị phân gọi là bit (thường được biểu diễn bằng các số 0 và 1). Tập các bit biểu diễn số cơ số 10 hoặc cơ số 16 có thể được dùng cho bộ vi điều khiển. Bộ vi điều khiển bao gồm một bộ vi xử lý cộng thêm bộ nhớ và các thiết bị phụ trợ khác. Chương trình trong bộ vi xử lý sử dụng giá trị số này cùng với các đầu vào khác và giá trị được tải trước được gọi là giá trị chuẩn để xác định các lệnh đầu ra. Giống như đầu vào của bộ vi xử lý, những đầu ra này có dạng số và có thể được biểu diễn bằng một tập các bit. Sau đó bộ biến đổi số-tương tự (DAC) thường được sử dụng để chuyển đổi giá trị số thành một tín hiệu tương tự. Tín hiệu tương tự dùng cho một cơ cấu chấp hành để điều khiển một thiết bị vật lý hoặc tác động lên môi trường vật lý. Sau đó, bộ cảm biến sẽ thực hiện các phép đo mới và quy trình được lặp lại, như vậy một vòng lặp điều khiển phản hồi đã được hoàn thành. Thời gian cho toàn bộ quá trình vận hành này được đồng bộ hoá bằng việc sử dụng xung đồng hồ.
Ví dụ về thiết bị dân dụng/văn phòng
Một ví dụ về hệ cơ điện tử là hệ thống sưởi ấm hoặc làm lạnh thông thường ở các gia đình hoặc công sở. Những hệ thống đơn giản sử dụng một bộ điều chỉnh nhiệt lưỡng kim với các tiếp điểm điều khiển một chuyển mạch thuỷ ngân dùng để bật, tắt lò sưởi hoặc máy điều hoà. Hệ thống điều hòa hiện đại cũng sử dụng những thành phần cơ bản này cùng với các thành phần khác và điều khiển bằng chương trình máy tính. Bộ cảm biến nhiệt độ sẽ theo dõi môi trường vật lý và đưa ra mức điện áp như thể hiện ở hình 3.2 (mặc dù nói chung trên thực tế nó không hoàn toàn là một chức năng đơn giản như vậy).

HÌNH 3.1 Hệ thống điều khiển vi xử lý
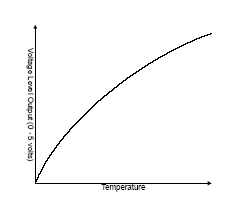
HÌNH 3.2 Mức điện áp
Sau khi ADC thực hiện bước biến đổi, bộ vi điều khiển dùng các dữ liệu nhiệt độ được số hoá cùng với một bộ tạo xung đồng hồ 24 giờ và mức nhiệt độ người sử dụng yêu cầu để phát ra các tín hiệu điều khiển số. Tín hiệu này sẽ điều khiển cơ cấu chấp hành, thường là một bộ ngắt điện đơn giản trong ví dụ này.
Tiếp theo, bộ ngắt điện sẽ điều khiển động cơ để bật tắt thiết bị sưởi ấm hoặc làm lạnh. Các phép đo mới được thực hiện và chu trình được lặp lại. Mặc dù không phải là một sản phẩm cơ điện tử tầm cỡ như một máy ghi, nhưng nó là một hệ thống cơ điện tử bởi nó có sự kết hợp giữa các thành phần cơ khí, điện và máy tính. Hệ thống này cũng có thể kết hợp thêm một số đặc tính. Nếu nhiệt độ đo được rất cao, ví dụ 80oC, thì hoả hoạn rất có thể xảy ra. Vì thế không phải là một ý kiến hay nếu bật quạt gió hoặc đổ thêm ôxi vào lửa. Thay vào đó, hệ thống cần đặt chuông báo động hoặc sử dụng thiết bị truyền thông dữ liệu để cảnh báo hoả hoạn. Nhờ có điều khiển bằng máy tính này mà hệ thống được coi là “thông minh” ít nhất là so với những hệ thống được điều khiển dựa trên bộ ngắt mạch bằng thuỷ ngân kiểu cũ.
Ví dụ về ô tô
Ví dụ thứ hai là hệ thống phanh chống bó (ABS) ở nhiều phương tiện. Mục đích của loại hệ thống này là nhằm ngăn chặn việc khóa cứng một bánh xe, và như vậy sẽ tránh cho lái xe mất khả năng điều khiển hướng lái do bị trượt. Trong trường hợp này, các cảm biến được gắn với mỗi bánh xe để xác định vận tốc góc của các bánh. Các dữ liệu này, có thể là dạng sóng hoặc điện áp biến đổi theo thời gian, được truyền tới bộ vi điều khiển cùng với dữ liệu từ các cảm biến báo cáo về các đầu vào như vị trí phanh bàn đạp, tốc độ xe và độ lệch hướng. Sau quá trình biến đổi của ADC hoặc chương trình lưu giữ đầu vào thành một giá trị số, chương trình của bộ vi xử lý sẽ xác định hành động cần thiết. Đây chính là điểm khiến cho hướng phát triển giao diện người-máy tính (HCI) hoặc giao diện người-máy (HMI) trở thành hiện thực bằng việc tính đến “cảm nhận” của hệ thống đối với người sử dụng. Việc hiệu chuẩn hệ thống có thể điều chỉnh những phản ứng của người lái trong khi cho xe dừng lại bằng cách điều khiển phanh thông qua cơ cấu chấp hành. Có hai điều quan trọng cần lưu ý trong ví dụ này. Thứ nhất, cuối cùng xe cũng sẽ bị dừng lại do thuỷ lực tác động lên má phanh để giữ trống tang và roto – một chức năng hoàn toàn cơ học. Thứ hai, mặc dù ABS là một “sản phẩm thông minh”nhưng không phải là một thiết bị độc lập. Nó là một phần của hệ thống lớn hơn với nhiều bộ vi điều khiển hoạt động cùng nhau thông qua mạng dữ liệu.
Audio
Bo mạch Stereo 2*15W Ampli Class D
Audio
NEXTRON chân đế IC DIP8
Nổi bật
Điều khiển học lệnh từ xa hồng ngoại CHUNGHOP
Audio
Module DAC 24bit/192kHz cao cấp PCM1794
Audio
Ampli classD stereo 25W – TPA3100D2
Audio
Module led nháy theo nhạc 16×2 (stereo)
Audio
ON Semiconductor LM317 chính hãng
Audio
Module khuếch đại âm thanh PAM8610 10Wx2