Cơ điện tử
Giới thiệu về công nghệ micro và nano

Th3
Chương 5. Giới thiệu về công nghệ micro và nano
5.1 Giới thiệu
Xuất phát từ quá trình phát triển của công nghệ chế tạo vi điện tử, các thiết bị cỡ micro thường được phân loại không chỉ theo kích thước của chúng mà còn theo cấu tạo và cách sản xuất. Nói chung công nghệ nano được xem là có phạm vi từ những thiết bị cỡ micro nhỏ nhất xuống đến các thiết bị cỡ phân tử là tổ hợp của các phân tử đơn lẻ. Do có sự chồng chéo lên nhau của các hệ thống vi cơ điện tử (MEMS – MicroElectroMechanical Systems) và các hệ thống nano hay công nghệ nano nên có sự chia sẻ một tập hợp các nghiên cứu thiết kế kỹ thuật chung, duy nhất từ các hệ thống kỹ thuật thông thường khác. Có 2 nhân tố chính để phân biệt sự tồn tại, tính hiệu quả và sự phát triển của các bộ chuyển đổi cỡ micro và nano với các bộ biến đổi bình thường. Thứ nhất là kích thước vật lý và thứ hai là qui trình và công nghệ sản xuất. Nhân tố thứ nhất bị chi phối bởi các định luật vật lý và như vậy nó là nhân tố cơ bản trong khi nhân tố thứ 2 liên quan tới sự phát triển công nghệ sản xuất, là một nhân tố quan trọng, mặc dầu không phải là chủ yếu. Nhờ sự kết hợp các nhân tố này, các bộ chuyển đổi thường không thể chế tạo bằng cách giảm kích thước hình học các bộ chuyển đổi thông thường.
Kích thước vật lý
Các lực tác động đến các thiết bị cỡ micro khác các thiết bị tương tự cỡ thường. Đó là vì kích thước một hệ thống vật lý sự ảnh hưởng đáng kể tới các hiện tượng vật lý là cái quyết định ứng xử động lực học của hệ thống này. Ví dụ, các hệ thống kích thước lớn bị ảnh hưởng nhiều hơn bởi các hiệu ứng quán tính so với các hệ thống kích thước nhỏ, trong khi các hệ thống nhỏ lại bị tác động nhiều hơn bởi các hiệu ứng bề mặt. Hiện tượng các con côn trùng nhỏ có thể đứng trên bề mặt nước phẳng nhờ sức căng bề mặt là một ví dụ. Sức căng bề mặt đó cũng xuất hiện khi con người tiếp xúc với nước nhưng với kích thích của con người, các lực liên kết thường không đáng kể. Thế giới mà trong đó con người đang sống bị chi phối bởi các lực giống với thế giới mà các con côn trùng đang sống, nhưng các lực này tồn tại theo các tỷ lệ rất khác nhau. Vì trong thực tế, nói chung các lực quán tính thường tỷ lệ với thể tích, và các lực bề mặt thường tỷ lệ với diện tích bề mặt. Do thể tích thay đổi với lũy thừa bậc 3 của độ dài và diện tích với lũy thừa bậc 2 nên với cùng hình dáng thì các vật nhỏ hơn có tỉ lệ diện tích bề mặt lớn hơn các vật lớn.
Các mối quan hệ tỉ lệ chính xác cho các dạng lực khác nhau có thể nhận được bằng việc kết hợp chặt chẽ các kỹ thuật phân tích thứ nguyên [1-5]. Ví dụ, các lực quán tính có thể được biểu diễn theo kích thước như sau , ở đây là lực quán tính tổng quát, là tỷ trọng của một vật, L là độ dài tổng quát, và x là dịch chuyển. Mối quan hệ này hình thành một nhóm không thứ nguyên đơn, được cho bởi:
Với sự đồng dạng hình học và động học, quan hệ tỉ lệ có thể được biểu diễn như sau: ,ở đây L là độ dài, x là động học, t là thời gian, chỉ số 0 là chỉ hệ ban đầu, và chỉ số s biểu thị hệ đã biến đổi. Do sự đồng dạng vật lý yêu cầu nhóm không thứ nguyên (P) không thay đổi giữa các kích thước, nên mối liên hệ lực được cho bởi , với giả thiết rằng đặc tính tập trung (tỷ trọng) không đổi (tức là, ). Lực quán tính vì thế tỷ lệ theo hệ số, ở đây N là hệ số tỷ lệ hình học. Ngược lại, một hệ quán tính có kích thước nhỏ hơn với hệ số N, lực yêu để tạo ra một gia tốc tương đương là nhỏ hơn với hệ số . Một phân tích đồng dạng chỉ ra rằng các lực nhớt tỷ lệ theo hệ số N2 (với độ nhớt không đổi), và các lực đàn hồi tỷ lệ N2 (với suất đàn hồi E không đổi). Do đó, với cùng hình dáng hình học thì lực quán tính của hệ có kích thước nhỏ hơn sẽ có vai trò không đáng kế so với lực nhớt và lực đàn hồi.
Cơ chế chung của sự chuyển đổi điện-cơ
Cơ chế chủ yếu cho cảm biến và chấp hành là sự chuyển đổi năng lượng. Các dạng cơ bản của sự chuyển đổi điện – cơ vật lý có thể được nhóm thành 2 loại. Loại thứ nhất là chuyển đổi đa thành phần, họat động dựa trên sự tương tác không tiếp xúc giữa các vật. Loại thứ hai là các chuyển đổi hoạt động dựa trên sự biến dạng hay còn gọi là chuyển đổi bán dẫn, loại chuyển đổi này sử dụng các đặc tính kết cấu của vật (ví dụ như sự thay đổi pha của tinh thể thạch anh hoặc sự liên kết lưỡng cực phân tử). Loại thứ nhất gồm có chuyển đổi điện–từ dựa trên phương trình Lorentz và định luật Faraday, và tương tác tĩnh điện dựa trên định luật Coulomb. Loại thứ hai gồm có các hiệu ứng áp điện, hợp kim nhớ thù hình, và các vật liệu từ giảo, điện giảo và quang giảo. Mặc dù vậy các vật liệu với những đặc tính như trên mới chỉ xuất hiện trong một số ít các ứng dụng nghiên cứu, còn sự phát triển của các hệ thống cỡ micro hiện nay bị ảnh hưởng đáng kể bởi sự ứng dụng các tương tác tĩnh điện và điện–từ. Với tầm quan trọng của chúng, chuyển đổi tĩnh điện và điện–từ sẽ được giới thiệu trong các phần tiếp theo.
Các đặc tính chuyển đổi cảm biến và cơ cấu chấp hành
Các đặc tính liên quan cho cả công nghệ vi cảm biến và vi cơ cấu chấp hành là khả năng lặp lại, khả năng chế tạo ở kích thước nhỏ, sự loại trừ các ảnh hưởng không cần thiết, dải thông thích hợp và nếu có thể, cả tính tuyến tính. Các đặc tính riêng liên quan tới vi cơ cấu chấp hành là lực có thể thực hiện, dịch chuyển, công suất, dải thông (hay tốc độ phản ứng), và hiệu suất. Các đặc tính riêng liên quan tới vi cảm biến là độ phân giải cao và khả năng loại bỏ hiện tượng trễ và trôi.
5.2 Vi cơ cấu chấp hành
Chấp hành tĩnh điện
Các cơ cấu chấp hành đa thành phần được dùng rộng rãi nhất là những cơ cấu dựa trên chuyển đổi tĩnh điện. Những cơ cấu chấp hành này cũng có thể được coi như một loại điện dung thay đổi, bởi chúng hoạt động giống như các cơ cấu chấp hành điện-từ kiểu từ trở biến thiên. (ví dụ, các động cơ bước từ trở biến thiên). Các cơ cấu chấp hành tĩnh điện được phát triển cả dạng chuyển động thẳng và dạng quay. Hai dạng phổ biến nhất của cơ cấu chấp hành tĩnh điện chuyển động thẳng là loại truyền động vuông góc và loại tiếp tuyến hay còn gọi là loại truyền động dạng lược, được minh họa trên hình 5.1 và 5.2. Chú ý rằng cả hai loại cơ cấu chấp hành đều được treo bởi cơ cấu uốn và như vậy lực đầu ra bằng lực chấp hành tĩnh điện trừ đi lực đàn hồi dùng để bù việc treo uốn. Loại truyền động vuông góc của vi cơ cấu chấp hành tĩnh điện hoạt động giống như một cái micro dạng tụ. Với dạng truyền động này, lực chấp hành được cho bởi:
ở đây A là tổng diện tích của các bề mặt song song, là hằng số điện môi của không khí, v là điện áp giữa các bề mặt và x là khoảng cách giữa các bề mặt. Lực chấp hành của truyền động dạng lược được cho bởi
ở đây w là độ rộng của các bề mặt, là hằng số điện môi của không khí, v là điện áp giữa các bề mặt, và d là khoảng cách giữa các bề mặt. Sự nghiên cứu thứ nguyên của 2 mối liên hệ này chỉ ra rằng lực là độc lập với hệ số tỷ lệ hình học và động học, với một cơ cấu chấp hành tĩnh điện được làm giảm về hình học và động học bởi hệ số N thì lực sinh ra bởi cơ cấu chấp hành này trước và sau khi giảm là như nhau. Vì các lực liên quan đến hầu hết các hiện tượng vật lý khác đều giảm đáng kể ở kích thước nhỏ, nên các lực tĩnh điện ở cỡ micro là tương đối lớn so với các lực khác. Sự quan sát này được minh họa rõ ràng bởi thực tế là tất cả các lực liên kết phân tử có bản chất là lực tĩnh điện và như vậy sức bền của tất cả vật liệu là kết quả của các lực tĩnh điện [6].
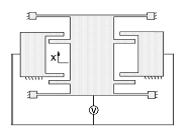
HÌNH 5.1 Sơ đồ cơ cấu chấp hành tĩnh điện truyền động vuông góc

HÌNH 5.2 Cơ cấu chấp hành truyền động dạng lược.
Khi được nạp năng lượng điện cực sẽ chuyển động về phía trước
Lực đạt được lớn nhất của các cơ cấu chấp hành tĩnh điện đa thành phần bị giới hạn bởi sự đánh thủng điện môi của không khí, hiện tượng này xảy ra trong không khi khô tại giá trị 0.8 x 106 V/m. Fearing [7] xác định rằng giới hạn trên của lực được tạo ra bởi chấp hành tĩnh điện là xấp xỉ 10 N/cm2. Do các truyền động tĩnh điện không có bất kỳ động lực học chấp hành đáng kể nào, và do quán tính của phần tử chuyển động thường nhỏ, nên dải thông chấp hành thường khá rộng, cỡ 1 kHz.
Hành trình chuyển động đạt được lớn nhất của các cơ cấu chấp hành dạng vuông góc bị giới hạn bởi vùng đàn hồi của cơ cấu treo uốn và ngoài ra còn bởi sự phụ thuộc của lực chấp hành vào khoảng cách giữa các bề mặt, như đã trình bày trong các phương trình ở trên. Theo Fearing, một hành trình tiêu biểu cho một cơ cấu chấp hành dạng vuông góc được vi gia công bề mặt vào khoảng 2 micro mét. Có thể tăng độ dịch chuyển bằng cách dùng một dãy các cơ cấp chấp hành tĩnh điện dạng vuông góc, như đề xuất của Bobbio [8,9].
Hành trình chuyển động tiêu biểu của một cơ cấu chấp hành dạng lược được vi gia công bề mặt là khoảng một vài micro mét, thậm chí có thể ít hơn. Hành trình đạt được lớn nhất trong một truyền động dạng lược bị giới hạn chủ yếu bởi tính cơ học của hệ thống treo uốn. Hệ thống treo nên có chiều trùng với chiều tác động để làm tăng khả năng dịch chuyển, nhưng độ cứng theo phương vuông góc với hướng này phải đủ lớn nhằm tránh các bản mặt song song chạm vào nhau do sự không thẳng hàng. Tuy nhiên, khi sự đồng nhất giữa chiều của hệ thống treo và chiều chuyển động tăng lên thì độ cứng theo chiều trực giao sẽ bị giảm. Ngoài ra, để tăng độ dịch chuyển thì phải tăng khoảng cách giữa các bề mặt, tuy nhiên điều này sẽ làm giảm tổng lực.
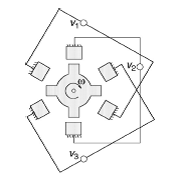
Loại phổ biến nhất của các cơ cấu chấp hành tĩnh điện quay là động cơ điện dung biến đổi và động cơ truyền động điều hòa (hay còn gọi là động cơ truyền động rung), được minh họa lần lượt trên hình 5.3 và 5.4. Hai động cơ này hoạt động theo nguyên tắc giống như cơ cấu chấp hành tuyến tính truyền động dạng lược. Động cơ điện dung biến đổi được đặc trưng bởi khả năng hoạt động tốc độ cao, mô men thấp. Để có được mức mô men thích hợp cho hầu hết các ứng dụng thì cần phải có một số dạng truyền động vi cơ khí đặc biệt, tuy nhiên hiện nay vẫn chưa có những loại truyền động này. Rô-to của động cơ rung hoạt động bằng cách quay quanh stato, tạo ra một truyền động tự điều hòa và do đó tạo ra một tỷ số truyền lớn (khoảng vài trăm lần). Chú ý rằng rô-to phải được cách ly tốt để quay quanh stato mà không có tiếp xúc điện. Nhược điểm của loại cơ cấu chấp hành này là chuyển động của rô-to không đồng tâm với stato, điều này làm cho việc ghép tải vào một vi trục trở nên khó khăn hơn.
Các ví dụ về các cơ cấu chấp hành tĩnh điện tuyến tính dạng vuông góc được đưa ra bởi Bobbio [8,9] và Yamaguchi [10]. Các ví dụ về cơ cấu chấp hành tĩnh điện truyền động dạng lược được đưa ra bởi Kim [11] và Matsubara [12], những cơ cấu chấp hành loại này nhưng có kích thước lớn hơn được giới thiệu bởi Niino [13]. Các ví dụ về động cơ tĩnh điện quay điện dung biến thiên được đưa ra bởi Huang [14], Mehragany [15], và Trimmer và Gabriel [16]. Các ví dụ về động cơ truyền động điều hòa được đưa ra bởi Mahragany [17,18], Price [19], Trimmer và Jebens [20,21], và Furuhata [22]. Các vi cơ cấu chấp hành tĩnh điện vẫn còn là một chủ đề trong nghiên cứu và phát triển, và như thế hiện nay chưa có mặt trên thị trường.
HÌNH 5.3 Động cơ tĩnh điện dạng điện dung thay đổi.
Các cặp điện cực đối diện được lần lượt nạp năng lượng để làm quay rôto

HÌNH 5.4 Động cơ tĩnh điện dạng truyền động điều hòa.
Các điện cực kề liền được lần lượt nạp năng lượng làm quay rôto (được cách ly) quanh stato
Chấp hành điện-từ
Chấp hành điện-từ kích thước micro không có nhiều như ở kích thước thông thường. Có thể một phần do sự hoài nghi gần đây về phạm vi của các lực từ, và một phần do những khó khăn trong việc chế tạo theo bản sao của các thiết kế kích thước thường. Hầu hết các chuyển đổi điện từ dựa trên một dây dẫn mang điện trong một từ trường, được mô tả bằng phương trình Lorentz:
ở đây F là lực trên dây dẫn, I là dòng điện trong dây dẫn, l là chiều dài dây dẫn, và B là mật độ từ thông. Trong mối liên hệ này, mật độ từ thông là một biến số tập trung và như vậy (với vật liệu đã cho) không đổi với thang đo. Tuy nhiên, xác định dòng điện cũng không đơn giản. Điện trở của dây được cho bởi
ở đây là suất điện trở của dây (một biến số tập trung), l là chiều dài, và A là diện tích tiết diện ngang. Nếu một dây có kích thước hình học giảm dần bởi hệ số N, điện trở sẽ tăng dần bởi hệ số N. Do công suất tiêu hao trên dây là I2R, giả thiết dòng điện không đổi, suy ra công suất tiêu hao trên dây hình dáng nhỏ hơn sẽ tăng dần theo hệ số N. Giả sử tiêu hao công suất lớn nhất với một dây đã cho được xác định bởi diện tích bề mặt của dây, một dây nhỏ hơn bởi hệ số N sẽ có thể làm tiêu hao công suất với hệ số N2. Do đó tiêu hao công suất của dòng điện không đổi là rất nhỏ. Một giả thiết tốt hơn là dòng điện lớn nhất bị giới hạn bởi tiêu hao công suất lớn nhất, và công suất phụ thuộc vào diện tích bề mặt của dây. Nếu một dây dẫn nhỏ đi với hệ số N thì tiêu hao công suất sẽ giảm đi với hệ số N2, do đó dòng điện trong dây dẫn sẽ giảm với hệ số N3/2. Đưa kết luận này vào phương trình Lorentz ta sẽ thấy rằng nếu một cơ cấu chấp hành điện-từ nhỏ hơn về hình học bởi hệ số N thì lực tác động sẽ nhỏ hơn với hệ số N5/2. Trimmer và Jebens đã đưa ra một phân tích tương tự, và chứng minh rằng các lực điện-từ tỷ lệ với hệ số N2 khi gia thiết nhiệt độ tăng với tốc độ không đổi trong dây, N5/2 khi giả thiết luồng (được miêu tả ở trên) nhiệt (công suất) không đổi, và N3 khi giả thiết mật độ dòng điện không đổi [23,24]. Trong bất kỳ trường hợp nào, việc xác định các lực điện-từ đều không thuận lợi bằng việc xác định lực tĩnh điện. Mặc dù vậy, chấp hành điện-từ vẫn được sử dụng trong các vi chấp hành, và hầu hết có thể xác định thuận lợi hơn các lực quán tính hay trọng lực.
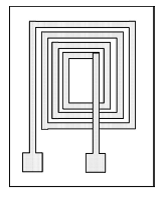
HÌNH 5.5 Sơ đồ vi cuộn dây được vi gia công bề mặt dùng cho chấp hành điện từ

HÌNH 5.6 Dãy vi Sơ đồ vi cuộn dây được vi gia công bề mặt của một vi nam châm vĩnh cửu, được Inoue và các cộng sự [25] mô tả. Mỗi cuộn dây sinh ra một từ trường hút hoặc đẩy nam châm vĩnh cửu được xác định bởi hướng của dòng điện. Nam châm không bay lên mà trượt trên bề mặt cách ly
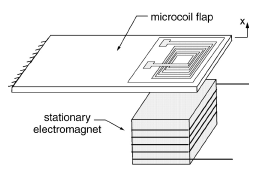
HÌNH 5.7 Nắp gập vi cuộn dây được mô tả bởi Liu và các cộng sự [26].
Tương tác giữa cuộn dây được nạp năng lượng và nam châm điện cố định làm cong nắp gập lên trên hoặc xuống dưới, phụ thuộc vào hướng của dòng điện chạy trong vi cuộn dây
Các tiếp cận kiểu Lorentz với vi chấp hành sử dụng các vi cuộn dây được vi gia công bề mặt, như thấy trên hình 5.5. Một cấu hình của cách tiếp cận này được thấy trong cơ cấu chấp hành của Inoue [25], sử dụng điều khiển dòng điện trong một dãy các vi cuộn dây nhằm định vị một vi nam châm vĩnh cửu trên một bản mặt, như minh họa trên hình 5.6. Một cách tiếp cận kiểu Lorentz khác được minh họa bởi Liu [26], sử dụng điều khiển dòng điện của một nắp gập vi cuộn dây trong một từ trường ngoài không đổi để thay đổi độ lệch của nắp gập, như thấy trên hình 5.7. Theo Liu thì độ lệch có thể lên tới 500 μm và một dải thông xấp xỉ 1000 Hz [26]. Các ví dụ khác của các cơ cấu chấp hành không quay dạng Lorentz là của Shinozawa [27], Wagner và Benecke [28], và Yanagisawa [29]. Judy [30] đã giới thiệu một cách tiếp cận từ tính hoàn toàn (tức là cơ bản không điện-từ), thực chất là tác động vào một vi nam châm vĩnh cửu treo-uốn bằng cách điều khiển từ trường bên ngoài.
Ahn [31] và Guckel [32] đều đã đưa ra các vi động cơ điện-từ loại điện dung biến thiên quay phẳng. Phương pháp từ trở biến thiên có nhiều ưu điểm hơn vì rô-to không yêu cầu đảo mạch và không cần phải là nam châm. Động cơ của Ahn kết hợp một stato 12 cực và một rô-to 10 cực, trong khi động cơ của Guckel sử dụng một stato 6 cực và một rô-to 4 cực. Cả 2 rô-to kết hợp đều có đường kính xấp xỉ 500 μm. Guckel báo cáo rằng tốc độ động cơ trên 30,000 vòng/phút, và Ahn xác định mô mem hãm lớn nhất là 1.2 μN.m. Cũng giống như các vi cơ cấu chấp hành tĩnh điện, các cơ cấu chấp hành điện-từ vi chế tạo cũng đang được nghiên cứu và phát triển, do đó hiện nay chưa có mặt trên thị trường.
5.3 Vi cảm biến
Do các vi cảm biến không truyền công suất, nên việc xác định lực là không quan trọng. Với cảm biến kích thước thông thường, các chỉ số chất lượng cần quan tâm là độ phân giải cao, không có trôi và trễ, đạt được một độ rộng dải đủ, và giảm thiểu các ảnh hưởng bên ngoài đến quá trình đo.
Các vi cảm biến thường dựa vào đo lường biến dạng cơ học, đo lường dịch chuyển cơ học hoặc trên đo lường tần số cộng hưởng cấu trúc. Hai dạng đầu có bản chất là đo lường tương tự, trong khi dạng sau có bản chất là đo lường dạng nhị phân, bởi đại lượng cần đo thường là tần số dao động. Do các cảm biến loại cộng hưởng đo lường tần số thay vì biên độ, nên chúng ít bị ảnh hưởng của nhiễu và như vậy độ phân giải của phép đo thường lớn hơn. Theo Guckel, cảm biến cộng hưởng có độ phân giải gấp một trăm lần cảm biến tương tự [33]. Tuy nhiên, chúng cũng phức tạp hơn và thường khó chế tạo hơn.
Dạng nguyên bản của đo lường trên cơ sở biến dạng là áp trở, trong khi phương pháp cơ bản để đo độ dịch chuyển là điện dung. Các cảm biến cộng hưởng yêu cầu phải có phương pháp kích thích cấu trúc và phương pháp phát hiện tần số cộng hưởng. Nhiều phương pháp chuyển đổi đã được sử dụng kết hợp cho các mục đích này, bao gồm kích thích tĩnh điện, dò điện dung, kích thích và phát hiện từ tính, kích thích nhiệt, và dò quang học.
Biến dạng
Nhiều vi cảm biến dựa trên đo lường biến dạng. Một cách thức cơ bản của đo lường biến dạng là qua biến dạng kế áp trở, là một dạng đo lường tương tự. Các biến dạng kế áp trở, hay còn gọi là thiết bị đo bán dẫn, thay đổi điện trở tương ứng với một biến dạng cơ học. Chú ý rằng các vật liệu áp điện cũng có thể được sử dụng để đo biến dạng. Nhớ rằng biến dạng cơ học sẽ gây ra một sự tích điện trong một vật liệu áp điện. Vấn đề cơ bản của việc dùng vật liệu áp điện là mạch đo bị giới hạn trở kháng, nên điện áp được tạo ra từ biến dạng cơ học sẽ dần dần yếu đi thông qua trở kháng đo. Ngược lại, sự thay đổi điện trở của một vật liệu áp điện là ổn định và có thể đo được dễ dàng với các tín hiệu ra ổn định. Tuy nhiên, một vấn đề với các vật liệu áp điện là độ biến dạng của chúng phụ thuộc nhiều vào nhiệt độ, và do đó thường phải bù nhiệt.
Một dạng khác của bộ áp trở bán dẫn là biến dạng kế cộng hưởng của Ikeda, nó cung cấp một dạng đo lường dựa trên tần số mà ít bị ảnh hưởng bởi nhiễu [34]. Biến dạng kế cộng hưởng là một cái dầm được treo nhẹ trên một bộ phận biến dạng và dính với nó tại các điểm đầu. Dầm biến dạng kế được kích thích một cách từ tính bằng các xung, và tần số dao động được phát hiện bởi một mạch dò từ tính. Khi dầm bị kéo dãn bởi lực biến dạng cơ học, tần số dao động sẽ tăng. Các cảm biến này có độ phân giải cao hơn các bộ điện áp thông thường và có hệ số nhiệt độ thấp hơn. Tuy nhiên, các cảm biến cộng hưởng yêu cầu một công nghệ chế tạo 3 chiều phức tạp, không giống như các bộ áp điện thông thường chỉ yêu cầu công nghệ trên mặt phẳng.
Áp suất
Một trong những công nghệ vi cảm biến thành công về mặt thương mại nhất là cảm biến áp suất. Các cảm biến áp suất vi gia công bán dẫn hiện trên thị trường có thể đo áp suất từ một đến một vài nghìn kPa, với độ phân giải cỡ 1/10,000. Các cảm biến loại này có một màng làm bằng chất bán dẫn được vi gia công, dưới sự tác động của chất lưu (tức là chất lỏng hoặc chất khí) màng sẽ giãn nở. Dạng đơn giản nhất của những cảm biến áp suất sử dụng các bộ áp trở nằm ở phần sau của màng để đo sự biến dạng do áp suất gây ra. Các ví dụ về thiết bị này được đưa ra bởi Fujii [35] và Mallon [36]. Một biến thể của dạng này là thiết bị của Ikeda. Thay vì một bộ áp trở để đo biến dạng, Ikeda sử dụng một bộ biến dạng kế cộng hưởng đo và điều khiển bằng điện-từ, như đã miêu tả ở phần trước[37]. Đo lường điện dung cũng là một phương pháp hay được sử dụng, phương pháp này đo điện dung giữa màng và một điện cực được gắn cứng và song song với màng. Một minh họa cho cách tiếp cận này được đưa ra bởi Nagata [38]. Một cách tiếp cận phức tạp hơn cho đo lường áp suất là loại của Stemme và Stemme, dùng cộng hưởng của màng để xác định áp suất [39]. Trong thiết bị này, màng được kích thích điện dung và được xác định bằng quang học. Áp suất tác động tải cơ học lên màng, làm tăng độ cứng và tần số cộng hưởng.
Gia tốc
Một loại vi cảm biến khác cũng thành công về mặt thương mại là gia tốc kế vi gia công bán dẫn, mà trong các dạng khác nhau có thể đo các khoảng gia tốc từ dưới 1 đến 1000 m/s2 (nghĩa là tới vài trăm g’s), với độ phân giải cỡ 1/10.000. Các cảm biến này sử dụng một khối có khả năng chịu được sự treo uốn và được vi gia công. Lực quán tính gây ra bởi gia tốc sẽ làm chỗ treo uốn thay đổi. Một phương pháp đo độ uốn là dùng các biến dạng kế áp trở gắn trên các chỗ uốn. Nhược điểm cơ bản của cách tiếp cận này là độ nhạy nhiệt của bộ đo áp trở. Một cách khác để đo độ uốn là sử dụng phương pháp đo điện dung. Trong các thiết bị này, điện dung được đo giữa khối được treo uốn và một điện cực được gắn cứng và song song với nó. Các ví dụ của cách tiếp cận này được đưa ra bởi Boxenhorn và Greiff [40], Leuthold và Rudolf [41], và Seidel [42]. Một cách khác để đo lực quán tính trên khối được treo uốn là đo tần số cộng hưởng ở các chỗ uốn đỡ. Lực quán tính do gia tốc sẽ tác động lên chỗ uốn gây ra biến thiên tần số cộng hưởng của nó. Vì thế, từ tần số dao động có thể đo được gia tốc. Các loại thiết bị này sử dụng một số dạng chuyển đổi để kích thích cộng hưởng cấu trúc của các chỗ uốn đỡ, và sau đó sử dụng các kỹ thuật đo lường khác để tìm ra tấn số dao động. Các ví dụ về loại thiết bị này được đưa ra bởi Chang [43], sử dụng kích thích tĩnh điện và đo điện dung, và đưa ra bởi Satchell và Greenwood [44], sử dụng kích thích nhiệt và đo áp trở. Các loại gia tốc kế này rất phức tạp, tuy nhiên độ phân giải được cải thiện đáng kể. Một biến thể khác của vi gia tốc kế là dạng cân bằng lực. Dạng thiết bị này đo vị trí của khối được treo uốn (thường bằng các phương pháp điện dung), sử dụng một vòng phản hồi và chấp hành tĩnh điện hoặc điện từ để duy trì độ lệch không của khối. Gia tốc khi đó là hàm của lực chấp hành. Thiết bị này có dải thông rộng và độ nhạy cao, nhưng thường phức tạp hơn và đắt hơn các loại khác. Các ví dụ về thiết bị cân bằng lực được đưa ra bởi Chau và cộng sự [45], Kuehnel và Sherman [46], cả hai đều sử dụng cảm biến điện dung và chấp hành tĩnh điện.
Lực
Cảm biến lực vi gia công silicon sử dụng các phương pháp đo giống như kiểu cảm biến áp suất và gia tốc kế vi gia công. Những dạng khác nhau của loại cảm biến lực này có thể đo lực trong khoảng từ vài mN đến N, với độ phân giải 1/10000. Cảm biến cơ học thường sử dụng dầm hoặc gối đỡ linh hoạt, chúng bị thay đổi dưới tác động của lực, do đó có thể đo lực thông qua đo độ biến dạng hoặc dịch chuyển (có thể thực hiện bằng các phương pháp áp trở hoặc điện dung). Một vi dụ về dạng thiết bị này là thiết bị của Despont và cộng sự sử dụng để đo lường điện dung [47]. Các thiết bị có độ phân giải cao hơn thường là kiểu dầm cộng hưởng, mà ở đó lực tác dụng tạo tải lên một dầm cộng hưởng dưới dạng sức căng. Sức căng càng tăng thì tần số cộng hưởng càng tăng. Một ví dụ về dạng thiết bị này là thiết bị của Blom và cộng sự [48].
Cảm biến đo vận tốc góc (Con quay hồi chuyển)
Con quay hồi chuyển kích thước thông thường sử dụng khớp nối không gian của hiệu ứng hồi chuyển dựa trên động lượng góc để đo vận tốc góc. Trong các thiết bị này, một đĩa được quay ở vận tốc cao không đổi quanh trục sơ cấp, sao cho khi đĩa quay quanh trục không thẳng hàng với trục sơ cấp (hoặc trục quay) thì mômen tạo nên hướng trực giao tỷ lệ với vận tốc góc. Các thiết bị này thường được đặt trong khớp các đăng với ổ bi ma sát thấp, kết hợp với động cơ để duy trì vận tốc quay và sử dụng bộ đo ứng suất để đo mô men hồi chuyển (và do đó tính được vận tốc góc). Một thiết kế như vậy có thể không thích hợp cho vi cảm biến do một vài yếu tố, một số trong đó bao gồm hiệu ứng thu nhỏ quán tính (như động lượng) ở kích thước nhỏ, thiếu ổ bi tương xứng, và thiếu động cơ micro thích hợp và thiếu quá trình vi gia công ba chiều phù hợp. Thay vào đó, các vi cảm biến vận tốc góc là dạng dao động kết hợp các hiệu ứng kiểu Coriolis hơn là cơ cấu hồi chuyển dựa trên động lượng góc của thiết bị kích thước thông thường. Gia tốc Coriolis được tạo ra do dịch chuyển tuyến tính trong hệ toạ độ đang quay đối với hệ qui chiếu quán tính. Cụ thể, nếu phần tử trên hình 5.8 đang chuyển động với vận tốc v trong hệ xyz, và nếu hệ xyz quay với vận tốc góc đối với hệ qui chiếu quán tính XYZ, thì gia tốc Coriolis sẽ có kết quả bằng . Nếu vật có khối lượng m, lực quán tính Coriolis sẽ có kết quả bằng (dấu trừ bởi vì hướng ngược với). Một con quay hồi chuyển dao động sử dụng hiệu ứng này được minh họa trên hình 5.9. Một khối lượng quán tính treo động được dao động theo chiều x, thường với truyền động dạng răng lược tĩnh điện. Vận tốc góc quanh trục z sẽ tạo ra gia tốc Coriolis và do đó tạo ra lực theo chiều y. Nếu vận tốc góc “bên ngoài” không đổi và vận tốc theo chiều x là hình sin, thì lực Coriolis sinh ra sẽ có hình sin, và khối lượng quán tính treo sẽ dao động theo chiều y với biên độ tỷ lệ theo vận tốc góc. Chuyển động theo chiều y, thường được đo bằng điện dung, được dùng để tính vận tốc góc. Các ví dụ về kiểu thiết bị này là các thiết bị của Bernstein và cộng sự.[49], Oh và cộng sự [50]. Chú ý rằng mặc dù dao dộng là thành phần chủ yếu của thiết bị này, nhưng chúng không phải là cảm biến cộng hưởng về mặt kỹ thuật, do chúng đo biên độ của dao động hơn là đo tần số.

HÌNH 5.8 Minh họa về gia tốc Coriolis do dịch chuyển trong hệ qui chiếu quay đối với hệ qui chiếu quán tính
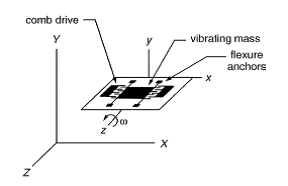
HÌNH 5.9 Sơ đồ con quay hồi chuyển dao động
5.4 Máy nano
Máy nano là thiết bị có kích thước từ các thiết bị MEMS nhỏ nhất xuống tới thiết bị được lắp rắp từ những phân tử đơn lẻ [51]. Phần này giới thiệu ngắn gọn các nguồn năng lượng, phân cấp cấu trúc, và tương lai dự kiến của việc chế tạo máy nano. Được xây dựng từ những thành phần cỡ phân tử thực hiện chức năng cơ học riêng biệt, các ứng cử viên của nguồn năng lượng để khởi động máy nano chỉ có thể là những ứng viên hoạt động ở mức phân tử. Đối với sản xuất, việc lắp ráp các máy nano là hoạt động một phân tử tại một thời điểm. Mặc dù các kỹ thuật kính hiển vi đã được sử dụng cho việc lắp ráp các cấu trúc nano, nhưng việc tự lắp ráp được xem như là phương pháp có thể thực hiện được trong sản xuất hàng khối.
Trong một thiết bị cỡ phân tử, rất nhiều thành phần phân tử được kết hợp với nhau để tạo thành một cấu trúc siêu phân tử, ở đó mỗi thành phần phân tử rời rạc thực hiện một chức năng riêng lẻ. Việc động kết hợp những phân tử riêng lẻ này làm cho thiết bị có khả năng hoạt động và thực thi những chức năng khác nhau. Các thiết bị phân tử cần một nguồn năng lượng để hoạt động. Năng lượng này cơ bản được dùng để kích thích các phân tử thành phần trong thiết bị và do đó năng lượng phải có bản chất hóa học. Năng lượng hoá học có thể nhận được bằng cách thêm các ion hydro, chất oxy hoá, v.v.., bằng cách gây phản ứng hoá học dưới tác động của ánh sáng, hoặc bằng các tác động của dòng điện. Hai phương pháp sử dụng nguồn năng lượng quang hoá và điện hoá được ưa chuộng do chúng không chỉ cung cấp năng lượng cho hoạt động của thiết bị, mà chúng có thể được sử dụng để định vị hoặc điều khiển thiết bị. Ngoài ra, có thể dùng việc biến đổi năng lượng để truyền dữ liệu nhằm thông báo việc thực thi và trạng thái của thiết bị. Một lý do khác cho sự ưu tiên đối với thiết bị phân tử dựa trên quang hóa và điện hoá là khi các thiết bị này cần hoạt động theo chu kỳ thì phản ứng hoá học điều khiển hệ thống phải có tính thuận nghịch. Do các quá trình quang hoá và điện hoá không dẫn tới việc tích trữ sản phẩm phản ứng, nên chúng được ứng dụng trong thiết bị nano.
Thiết bị phân tử được thiết kế hiện nay có khả năng chuyển động và điều khiển bằng phương pháp quang hoá. Một thiết bị là hệ thống khe và chốt cỡ phân tử, và một cái khác là hệ thống piston-xilanh [51]. Việc xây dựng các thiết bị siêu phân tử như thế thuộc về lĩnh vực của những nhà hoá học, những người giỏi về điều khiển phân tử.
Như một sự tiến về kích thước tới mức tiếp theo của máy nano, chúng ta đã có những thiết bị được sản xuất từ (hoặc với) các ống nano carbon vách đơn (SWNT – Single-walled carbon nanotubes) và/hoặc ống nano carbon đa vách (MWNT – Multi-walled carbon nanotubes) với đường kính vài nano mét. Chúng ta sẽ chỉ thảo luận về ống nano carbon (CNT), mặc dù có rất nhiều ống nano được tạo ra từ các vật liệu khác, đặc biệt là bitmut. Độ bền và tính đa dụng của CNT làm cho chúng trở thành một công cụ tốt cho kỹ sư thiết kế vi máy. Chúng có độ dẫn điện cao với khả năng mang dòng điện hàng tỷ ampe trên một centimét vuông. Chúng là bộ phát quang trường tuyệt vời ở điện áp hoạt động thấp. Hơn nữa, CNT phát ra sáng một cách rõ nét và nó tạo ra một lĩnh vực mới hoàn toàn của ứng dụng chụp ảnh giao thoa laze. Suất đàn hồi của CNT là cao nhất của tất cả các vật liệu được biết hiện nay[52]. Các tính chất điện và độ bền cơ học rất cao này làm MWNT trở thành đầu dò kính hiển vi lực nguyên tử. CNT có khả năng được sử dụng như các thiết bị lắp ráp phân tử để chế tạo các máy nano một nguyên tử tại một thời điểm.
Hai ứng dụng công nghệ nano rõ ràng của CNT là ổ bi nano và lò xo nano. Zettl và Cumings [53] đã tạo ra ổ bi tuyến tính và lò xo nano lực không đổi dựa trên MWNT. CNT có thể tạo ra tập hợp cơ bản các khối xây dựng cỡ nano mét, do đó các máy nano với nhiều loại khác nhau có thể được chế tạo. Những máy nano này có thể được sử dụng để lắp ráp các máy nano mà sau đó được dùng để thiết kế máy với các kiểu và kích thước khác nhau. Những máy này có thể cạnh tranh, thậm chí vượt trội so với tất cả thiết bị hiện có.
SWNT cũng có thể được sử dụng như một cơ cấu chấp hành cơ-điện. Baughman và cộng sự [54] đã chứng minh rằng các tấm SWNT sinh ra lực lớn hơn cơ bắp tự nhiên và sức căng lớn hơn sắt từ môđun cao. Người ta dự đoán rằng cơ cấu chấp hành dùng các tấm SWNT có thể cung cấp mật độ công việc trên một chu kỳ cao hơn các cơ cấu chấp hành đã biết. Kim và Lieber [55] đã xây dựng những cái kẹp nano SWNT và MWNT. Những thiết bị cơ-điên cỡ nano này được dùng để thao tác và kiểm tra cấu trúc nano. CNT dẫn điện được gắn vào các điện cực trên vi ống nghiệm thuỷ tinh dạng kéo. Điện áp đặt vào điện cực mở và đóng đầu tự do của CNT. Kim và Lieber đã chứng minh khả năng của kẹp Nano bằng cách tìm và gắp những vật siêu nhỏ và dây cỡ nano. Thiết bị này có thể được dùng để điều khiển tế bào sinh học và thậm chí thao tác với các cơ quan và các cụm tế bào người. Có lẽ, quan trọng hơn, những cái kẹp này có khả năng được sử dụng để lắp ráp những máy nano khác.
Các dạng tay máy cỡ nano khác nhau đã được giới thiệu bởi [56] bao gồm tay máy khí nén có thể được định hình để tạo nên các thiết bị dạng xúc tu, con rắn, hoặc nhiều khoang. Drexler đã chế tạo các tay máy nano có khả năng lồng vào nhau cho các công việc định vị và lắp ráp phân tử chính xác. Tay máy này có dạng hình trụ với đường kính 35 nm và chiều dài có khả năng mở rộng tới 100 nm. Một số tấm Stewart 6 bậc tự do được giới thiệu trong [56], trong đó có tấm cho phép chiều dài thanh giằng được thay đổi trong phạm vi 100 nm với bước thay đổi là 0.1 nm. Một số các thiết bị nano khác bao gồm gia tốc kế lò xo- hộp, gia tốc kế dịch chuyển, gia tốc kế hồi chuyển trục đứng và con quay hồi chuyển nano khớp các – đăng cũng đã được giới thiệu và thiết kế [56].
Hiện nay, rất nhiều hướng nghiên cứu đạng tập trung vào các thiết bị lắp ráp và tự nhân bản cỡ phân tử (Nanorobot tự nhân bản ). Tự lắp ráp là cách duy nhất cho công nghệ nano phát triển theo hướng kỹ thuật và công nghệ. Việc lắp ráp hàng tỷ hoặc hàng nghìn tỷ nguyên tử – một nguyên tử tại một thời điểm có thể là một công việc lớn. Nó cần một sự đầu tư khổng lồ về thiết bị, phòng thí nghiệm và thời gian. Freitas [56] đã mô tả hạ tầng cơ sở cần thiết để chế tạo Nanorobot y tế đơn giản: một tế bào hô hấp hình cầu 1mm bao gồm 18 tỷ nguyên tử. Ông tính toán rằng để chế tạo được 2 nanorobot trong vòng 10 năm thì cần phải có một dây chuyền sản xuất để triển khai một hệ thống gồm 100 bộ lắp ráp vi kính hiển vi đầu dò quét kích thước micro (SPM), trong đó mỗi bộ lắp ráp có khả năng đặt một nguyên tử trong một giây lên một vùng lắp ráp hội tụ. Nếu như tốc độ chế tạo các bộ lắp ráp thậm chí là số lượng nanorobot được chế tạo trong mỗi phút có tăng lên nhiều lần, thì vẫn phải mất hai triệu năm để xây dựng một cm3 đầu tiên của các nanorobot y học. Bởi vậy, rõ ràng là tương lai của công nghệ nano y học và kỹ thuật nano phải theo hướng tự lắp ráp và tự nhân bản.
Chương 1. Cơ điện tử là gì ?
Chương 2. Cách tiếp cận thiết kế cơ điện tử
Chương 3. Giao diện hệ thống, thiết bị và hệ thống điều khiển
Chương 4. Các bộ điều khiển dựa trên vi xử lý và vi điện tử
Tài liệu tham khảo
- Bridgman, P. W., Dimensional Analysis, 2nd Ed., Yale University Press, 1931.
- Buckingham, E., “On physically similar systems: illustrations of the use of dimensional equations,” Physical Review, 4(4):345–376, 1914.
- Huntley, H. E., Dimensional Analysis, Dover Publications, 1967.
- Langhaar, H. L., Dimensional Analysis and Theory of Models, John Wiley and Sons, 1951.
- Taylor, E. S., Dimensional Analysis for Engineers, Oxford University Press, 1974.
- Israelachvili, J. N., Intermolecular and Surface Forces, Academic Press, 1985, pp. 9–10.
- Fearing, R. S., “Microactuators for microrobots: electric and magnetic,” Workshop on Micromechatronics, IEEE International Conference on Robotics and Automation,
- Bobbio, S. M., Keelam, M. D., Dudley, B. W., Goodwin-Hohansson, S., Jones, S. K., Jacobson, J. D., Tranjan, F. M., Dubois, T. D., “Integrated force arrays,” Proceedings of the IEEE Micro Electro Mechanical Systems, 149–154, 1993.
- Jacobson, J. D., Goodwin-Johansson, S. H., Bobbio, S. M., Bartlett, C. A., Yadon, L. N., “Integrated force arrays: theory and modeling of static operation,” Journal of Microelectromechanical Systems, 4(3):139–150, 1995.
- Yamaguchi, M., Kawamura, S., Minami, K., Esashi, M., “Distributed electrostatic micro actuators,” Proceedings of the IEEE Micro Electro Mechanical Systems, 18–23, 1993.
- Kim, C. J., Pisano, A. P., Muller, R. S., “Silicon-processed overhanging microgripper,” Journal of Microelectromechanical Systems, 1(1):31–36, 1992.
- Matsubara, T., Yamaguchi, M., Minami, K., Esashi, M., “Stepping electrostatic microactuator,” International Conference on Solid-State Sensor and Actuators, 50–53, 1991.
- Niino, T., Egawa, S., Kimura, H., Higuchi, T., “Electrostatic artificial muscle: compact, high-power linear actuators with multiple-layer structures,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 130–135, 1994.
- Huang, J. B., Mao, P. S., Tong, Q. Y., Zhang, R. Q., “Study on silicon electrostatic and electroquasistatic micromotors,” Sensors and Actuators, 35:171–174, 1993.
- Mehragany, M., Bart, S. F., Tavrow, L. S., Lang, J. H., Senturia, S. D., Schlecht, M. F., “A study of three microfabricated variable-capacitance motors,” Sensors and Actuators, 173–179, 1990.
- Trimmer, W., Gabriel, K., “Design considerations for a practical electrostatic micromotor,” Sensors and Actuators, 11:189–206, 1987.
- Mehregany, M., Nagarkar, P., Senturia, S. D., Lang, J. H., “Operation of microfabricated harmonic and ordinary side-drive motors,” Proceeding of the IEEE Conference on Micro Electro Mechanical Systems, 1–8, 1990.
- Dhuler, V. R., Mehregany, M., Phillips, S. M., “A comparative study of bearing designs and operational environments for harmonic side-drive micromotors,” IEEE Transactions on Electron Devices, 40(11):1985–1989, 1993.
- Price, R. H., Wood, J. E., Jacobsen, S. C., “Modeling considerations for electrostatic forces in electrostatic microactuators,” Sensors and Actuators, 20:107–114, 1989.
- Trimmer, W., Jebens, R., “An operational harmonic electrostatic motor,” Proceeding of the IEEE Conference on Micro Electro Mechanical Systems, 13–16, 1989.
- Trimmer, W., Jebens, R., “Harmonic electrostatic motors,” Sensors and Actuators, 20:17–24, 1989.
- Furuhata, T., Hirano, T., Lane, L. H., Fontanta, R. E., Fan, L. S., Fujita, H., “Outer rotor surface micromachined wobble micromotor,” Proceeding of the IEEE Conference on Micro Electro Mechanical Systems, 161–166, 1993.
- Trimmer, W., Jebens, R., “Actuators for microrobots,” IEEE Conference on Robotics and Automation, 1547–1552, 1989.
- Trimmer, W., “Microrobots and micromechanical systems,” Sensors and Actuators, 19:267–287, 1989.
- Inoue, T., Hamasaki, Y., Shimoyama, , Miura, H., “Micromanipulation using a microcoil array,” Proceedings of the IEEE International Conference on Robotics and Automation, 2208–2213, 1996.
- Liu, C., Tsao, T., Tai, Y., Ho, C., “Surface micromachined magnetic actuators,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 57–62, 1994.
- Shinozawa, Y., Abe, T., Kondo, T., “A proportional microvalve using a bi-stable magnetic actuator,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 233–237, 1997.
- Wagner, B., Benecke, W., “Microfabricated actuator with moving permanent magnet,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 27–32, 1991.
- Yanagisawa, K., Tago, A., Ohkubo, T., Kuwano, H., “Magnetic microactuator,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 120–124, 1991.
- Judy, J., Muller, R. S., Zappe, H. H., “Magnetic microactuation of polysilicon flexure structures,” Journal of Microelectromechanical Systems, 4(4):162–169, 1995.
- Ahn, C. H., Kim, Y. J., Allen, M. G., “A planar variable reluctance magnetic micromotor with fully integrated stator and wrapped coils,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 1–6, 1993.
- Guckel, H., Christenson, T. R., Skrobis, K. J., Jung, T. S., Klein, J., Hartojo, K. V., Widjaja, I., “A first functional current excited planar rotational magnetic micromotor,” Proceedings of the IEEE Conference on Micro Electro Mechanical Systems, 7–11, 1993.
- Guckel, H., Sneigowski, J. J., Christenson, T. R., Raissi, F., “The application of fine grained, tensile polysilicon to mechanically resonant transducers,” Sensor and Actuators, A21–A23:346–351, 1990.
- Ikeda, K., Kuwayama, H., Kobayashi, T., Watanabe, T., Nishikawa, T., Yoshida, T., Harada, K., “Silicon pressure sensor integrates resonant strain gauge on diaphragm,” Sensors and Actuators, A21–A23:146–150, 1990.
- Fujii, T., Gotoh, Y., Kuroyanagi, S., “Fabrication of microdiaphragm pressure sensor utilizing micromachining,” Sensors and Actuators, A34:217–224, 1992.
- Mallon, J., Pourahmadi, F., Petersen, K., Barth, P., Vermeulen, T., Bryzek, J., “Low-pressure sensors employing bossed diaphragms and precision etch-stopping,” Sensors and Actuators, A21–23:89–95, 1990.
- Ikeda, K., Kuwayama, H., Kobayashi, T., Watanabe, T., Nishikawa, T., Yoshida, T., Harada, K., “Three-dimensional micromachining of silicon pressure sensor integrating resonant strain gauge on diaphragm,” Sensors and Actuators, A21–A23:1007–1009, 1990.
- Nagata, T., Terabe, H., Kuwahara, S., Sakurai, S., Tabata, O., Sugiyama, S., Esashi, M., “Digital compensated capacitive pressure sensor using cmos technology for low-pressure measurements,” Sensors and Actuators, A34:173–177, 1992.
- Stemme, E., Stemme, G., “A balanced resonant pressure sensor,” Sensors and Actuators, A21–A23: 336–341, 1990.
- Boxenhorn, B., Greiff, P., “Monolithic silicon accelerometer,” Sensors and Actuators, A21–A23:273–277, 1990.
- Leuthold, H., Rudolf, F., “An ASIC for high-resolution capacitive microaccelerometers,” Sensors and Actuators, A21–A23:278–281, 1990
- Seidel, H., Riedel, H., Kolbeck, R., Muck, G., Kupke, W., Koniger, M., “Capacitive silicon accelerometer with highly symmetrical design,” Sensors and Actuators, A21–A23:312–315, 1990.
- Chang, S. C., Putty, M. W., Hicks, D. B., Li, C. H., Howe, R. T., “Resonant-bridge two-axis microaccelerometer,” Sensors and Actuators, A21–A23:342–345, 1990.
- Satchell, D. W., Greenwood, J. C., “A thermally-excited silicon accelerometer,” Sensors and Actuators, A17:241–245, 1989.
- Chau, K. H. L., Lewis, S. R., Zhao, Y., Howe, R. T., Bart, S. F., Marchesilli, R. G., “An integrated force- balanced capacitive accelerometer for low-g applications,” Sensors and Actuators, A54:472–476, 1996.
- Kuehnel, W., Sherman, S., “A surface micromachined silicon accelerometer with on-chip detection circuitry,” Sensors and Actuators, A45:7–16, 1994.
- Despont, Racine, G. A., Renaud, P., de Rooij, N. F., “New design of micromachined capacitive force sensor,” Journal of Micromechanics and Microengineering, 3:239–242, 1993.
- Blom, F. R., Bouwstra, S., Fluitman, J. H. J., Elwenspoek, M., “Resonating silicon beam force sensor,” Sensors and Actuators, 17:513–519, 1989.
- Bernstein, J., Cho, S., King, A. T., Kourepenis, A., Maciel, P., Weinberg, M., “A micromachined comb-drive tuning fork rate gyroscope,” IEEE Conference on Micro Electro Mechanical Systems, 143–148, 1993.
- Oh, Y., Lee, B., Baek, S., Kim, H., Kim, J., Kang, S., Song, C., “A surface-micromachined tunable vibratory gyroscope,” IEEE Conference on Micro Electro Mechanical Systems, 272–277, 1997.
- Venturi, M., Credi, A., Balzani, V., “Devices and machines at the molecular level,” Electronic Properties of Novel Materials, AIP Conf. Proc., 544:489–494, 2000.
- Ajayan, P. M., Charlier, J. C., Rinzler, A. G., “PNAS,” 96:14199–14200, 1999.
- Zettl, A., Cumings, J., “Sharpened nanotubes, nanobearings and nanosprings,” Electronic Properties of Novel Materials, AIP Conf. Proc., 544:526–531, 2000.
- Baughman, R. H., et al., “Carbon nanotube actuators,” Science, 284:1340–1344, 1999.
- Kim, P., Lieber, C. M., “Nanotube nanotweezers,” Science, 286:2148–2150, 1999.
- Freitas, R. A., “Nanomedicine,” Vol. 1, Landes Bioscience, Austin, 1999.
Audio
ON Semiconductor LM317 chính hãng
Audio
Mini Amp PAM8403 Stereo 3W kèm Volume
Nổi bật
Điều khiển học lệnh từ xa hồng ngoại CHUNGHOP
Audio
NEXTRON chân đế IC DIP8
Audio
Module khuếch đại âm thanh PAM8610 10Wx2
Audio
Module led nháy theo nhạc 16×2 (stereo)
Audio
Ampli classD stereo 25W – TPA3100D2
Audio
Module DAC 24bit/192kHz cao cấp PCM1794