Cơ điện tử
Cơ điện tử là gì ?

Th3
Chương 1. Cơ điện tử là gì ?
Cơ điện tử là một giai đoạn tự nhiên trong quá trình phát triển mạnh mẽ của kỹ thuật thiết kế hiện đại. Sự phát triển của máy tính, tiếp theo là máy vi tính, máy tính nhúng,cùng với sự phát triển của công nghệ thông tin và công nghệ phần mềm đã khiến cho Cơ điện tử trở thành một yêu cầu cấp thiết trong nửa cuối thế kỷ 20. Sang thế kỷ 21, với những tiến bộ đã được dự báo trong các hệ cơ-điện-sinh học, máy tính lượng tử, hệ pico và nano cùng những phát triển khác, tương lai của Cơ điện tử sẽ đầy tiềm năng và triển vọng.
1.1 Các khái niệm cơ bản
Khái niệm Cơ điện tử được mở ra từ định nghĩa ban đầu của công ty điện tử Yasakawa. Trong các tài liệu xin bảo hộ thương hiệu của mình, Yasakawa định nghĩa Cơ điện tử như sau [1,2]:
“Thuật ngữ mechatronics (Cơ điện tử) được tạo thành bởi “mecha” trong mechanism (cơ cấu) và “tronics” trong electronics (điện tử). Nói cách khác, các công nghệ và sản phẩm được phát triển sẽ ngày càng được kết hợp chặt chẽ và hữu cơ thành phần điện tử vào trong các cơ cấu, và rất khó có thể chỉ ra ranh giới giữa chúng”
Khái niệm Cơ điện tử tiếp tục phát triển sau khi Yasakawa đưa ra định nghĩa đầu tiên. Một định nghĩa khác về Cơ điện tử thường hay được nói tới do Harashima, Tomizuka và Fukada đưa ra năm 1996 [3]. Theo họ, Cơ điện tử được hiểu là:
“Sự tích hợp chặt chẽ của kỹ thuật cơ khí với điện tử và điều khiển máy tính thông minh trong thiết kế và chế tạo các sản phẩm và quy trình công nghiệp”.
Cùng năm đó, Auslander và Kempf cũng đưa ra một định nghĩa khác như sau [4]:
“Cơ điện tử là sự ứng dụng các quyết định liên hợp tạo nên hoạt động của các hệ vật lý.”
Năm 1997, Shetty và Kolk lại quan niệm [5]:
“Cơ điện tử là một phương pháp luận được dùng để thiết kế tối ưu các sản phẩm cơ điện.”
Và gần đây, Bolton đề xuất định nghĩa [6]:
“Một hệ Cơ điện tử không chỉ là sự kết hợp chặt chẽ các hệ cơ khí, điện và nó cũng không chỉ đơn thuần là một hệ điều khiển; nó là sự tích hợp đầy đủ của tất cả những hệ trên.”
Tất cả những định nghĩa và phát biểu trên về Cơ điện tử đều chính xác và có giá trị, tuy nhiên bản thân chúng, nếu đứng riêng lẻ lại không định nghĩa được đầy đủ thuật ngữ Cơ điện tử. Mặc dù đã có những nỗ lực trong việc tiếp tục định nghĩa thuật ngữ Cơ điện tử, phân loại các sản phẩm Cơ điện tử và phát triển một chương trình giảng dạy Cơ điện tử chuẩn, nhưng cho đến nay vẫn chưa có một quan điểm thống nhất nào trong việc định nghĩa một cách toàn diện “thế nào là Cơ điện tử”. Tuy nhiên sự thiếu nhất trí này lại là một tín hiệu đáng mừng. Nó cho thấy rằng lĩnh vực này đang tồn tại, và là một chủ đề còn khá mới mẻ. Thậm chí khi không có định nghĩa thống nhất về Cơ điện tử, các kỹ sư cũng hiểu được bản chất triết học của Cơ điện tử từ những định nghĩa trên và từ bản thân kinh nghiệm sống của họ.
Đối với các nhiều kỹ sư thiết kế hàng đầu thì Cơ điện tử không còn là xa lạ. Nhiều sản phẩm kỹ thuật được tạo ra trong vòng 25 năm qua nhờ sự kết hợp các hệ cơ khí, điện tử và máy tính, tuy nhiên chúng lại do những kỹ sư chưa từng được đào tạo chính quy về thiết kế Cơ điện tử. Kỹ thuật thiết kế hiện đại, hiện được xem là một bộ phận của chuyên ngành Cơ điện tử, là những quy trình thiết kế mang tính tự nhiên. Rõ ràng việc nghiên cứu Cơ điện tử cung cấp cho các học giả quan tâm tìm hiểu và lý giải quy trình thiết kế một kỹ năng để định rõ, phân loại, sắp xếp và tổng hợp nhiều khía cạnh của công việc thiết kế sản phẩm thành một khối gắn kết. Khi những phân chia mang tính lịch sử giữa kỹ thuật cơ khí, điện, hàng không, hoá học, xây dựng và vi tính trở nên ít rõ ràng hơn, chúng ta nên bằng lòng với sự tồn tại của Cơ điện tử như một lĩnh vực nghiên cứu trong giới hàn lâm. Chuyên ngành Cơ điện tử cung cấp một cách thức giáo dục đóng vai trò định hướng cho các sinh viên kỹ thuật đang học tập và nghiên cứu theo mô hình đào tạo truyền thống ở hầu hết các trường kỹ thuật. Nhìn chung Cơ điện tử được toàn thế giới công nhận là một lĩnh vực nghiên cứu khá thú vị. Các chương trình đào tạo đại học và sau đại học về kỹ thuật Cơ điện tử được giảng dạy ở rất nhiều trường đại học. Các tạp chí chuyên ngành Cơ điện tử đang được xuất bản, các cuộc hội thảo về Cơ điện tử cũng đã và đang được tổ chức với số lượng người tham dự rất đông.
Cần hiểu rằng Cơ điện tử không chỉ là một cấu trúc thuận tiện cho việc tìm hiểu nghiên cứu của các nhà khoa học mà còn là cách tồn tại trong thực tiễn kỹ thuật hiện đại. Sự ra đời của mạch vi xử lý vào đầu thập niên 80 cùng với sự gia tăng khả năng kỹ thuật và giảm giá thành sản xuất đã tạo ra cuộc cách mạng hoá trong mô hình kỹ thuật thiết kế. Số lượng sản phẩm mới được phát triển dựa trên sự giao thoa giữa các quy tắc truyền thống của khoa học kỹ thuật, khoa học vi tính và khoa học tự nhiên đang không ngừng tăng lên. Những tiến bộ mới trong các quy tắc truyền thống đã được áp dụng ngày càng nhiều trong các thiết kế Cơ điện tử. Sự phát triển không ngừng của cuộc cách mạng công nghệ thông tin, những tiến bộ trong truyền thông không dây và thiết kế cảm biến thông minh (được phát triển dựa trên công nghệ MEMS) đã đảm bảo cho sự phát triển của mô hình thiết kế kỹ thuật trong những năm đầu thế kỷ 21.
1.2 Các thành phần chủ yếu của Cơ điện tử
Hệ Cơ điện tử có thể được phân chia thành những lĩnh vực nghiên cứu sau:
- Mô hình hệ vật lý
- Cảm biến và cơ cấu chấp hành
- Tín hiệu và hệ thống
- Máy tính và hệ logic
- Phần mềm và thu thập dữ liệu
Các thành phần chủ yếu của Cơ điện tử được minh họa trong hình 1.1. Khi lĩnh vực cơ điện tử tiếp tục phát triển, danh sách những vấn đề liên quan đến nó chắc chắn sẽ được mở rộng và phát triển.
1.3 Lịch sử phát triển
Những nỗ lực nhằm xây dựng các hệ cơ khí tự động có một lịch sử thú vị. Trên thực tế, thuật ngữ “tự động hoá” không được phổ biến cho tới thập niên 1940 khi công ty Ford Motor sử dụng thuật ngữ này để biểu thị một quá trình trong đó một cỗ máy chuyển một cụm lắp ráp từ vị trí này sang vị trí khác sau đó định vị chúng một cách chính xác cho các hoạt động lắp ráp phụ. Tuy nhiên sự phát triển thành công các hệ cơ khí tự động lại xuất hiện từ trước đó rất lâu. Ví dụ như những ứng dụng ban đầu của hệ điều khiển tự động xuất hiện ở Hy Lạp từ khoảng năm 300 đến năm thứ nhất trước Công nguyên với sự phát triển của cơ cấu điều chỉnh bằng phao. Điển hình là việc phát minh ra đồng hồ nước sử dụng phao điều chỉnh của Ktesibios và việc phát minh ra đèn dầu sử dụng phao điều chỉnh của Philon để duy trì lượng dầu liên tục có trong đèn. Sau đó, vào thế kỷ thứ nhất sau công nguyên dưới triều đại Alexandria, Heron đã cho xuất bản một cuốn sách mang tựa đề Pneumatica trong đó miêu tả những cách thức khác nhau trong việc sử dụng phao để điều chỉnh mực nước.
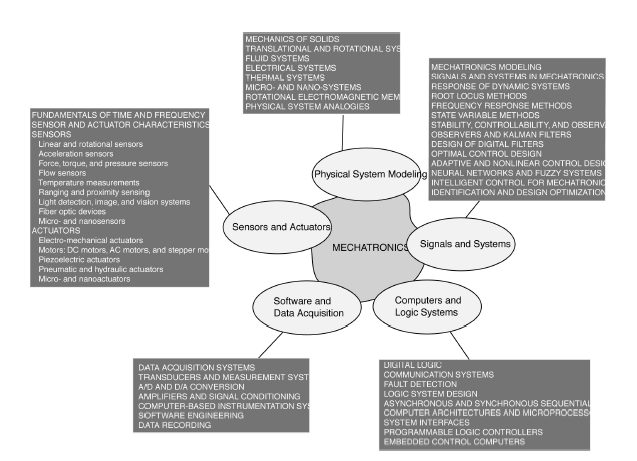
HÌNH 1.1 Các thành phần chính của Cơ điện tử
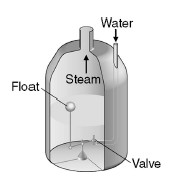
HÌNH 1.2 Thiết bị điều chỉnh mực nước.
(Theo Modern Control Systems, 9th ed., R. C. Dorf and R. H. Bishop, Prentice-Hall, 2001)
Vào khoảng giữa thế kỷ 17 và 19 ở châu Âu và Nga, có rất nhiều phát minh quan trọng đóng góp cho sự phát triển của Cơ điện tử. Ở Hà Lan, Cornelis Drebbel (1572-1633) đã phát minh ra máy điều chỉnh nhiệt độ được xem là một trong những hệ thống có phản hồi đầu tiên của kỷ nguyên. Sau đó, Dennis Papin (1647-1712) sáng chế thiết bị điều chỉnh áp suất an toàn cho nồi hơi vào năm 1681. Thiết bị điều chỉnh áp suất của Papin cũng tương tự như van nồi áp suất hiện nay. Vào năm 1642, Pascal đã phát minh ra máy tính cơ khí đầu tiên. Năm 1765, Polzunov người Nga đã phát triển hệ thống có phản hồi đầu tiên trong lịch sử. Thiết bị điều chỉnh mực nước của Polzunov, (hình 1.2), sử dụng một chiếc phao được nâng lên hạ xuống tùy theo mực nước, nhờ đó điều chỉnh van khóa nước bên trong nồi hơi. Những tiến bộ trong lý thuyết điều khiển đã thúc đẩy hơn nữa sự phát triển của tự động hóa với khởi nguồn là máy điều tốc ly tâm của Watt vào năm 1769. Máy điều tốc ly tâm (hình 1.3) được sử dụng để điều chỉnh tốc độ của động cơ hơi nước [10]. Bằng việc dùng phép đo tốc độ của trục đầu ra và sử dụng sự chuyển động của quả văng để điều chỉnh van và lượng hơi nước vào động cơ được điều chỉnh. Khi tốc độ của động cơ tăng lên, các quả văng trên bộ điều tốc được nâng lên và khoảng cách của chúng so với trục giữa được mở rộng, nhờ đó van được đóng lại. Đây là một ví dụ về hệ điều khiển có phản hồi trong đó dấu hiệu phản hồi và cơ cấu chấp hành là hai bộ phận không thể tách rời trong thiết bị cơ khí.
Nhờ có trực giác, những kỹ năng thực hành và lòng kiên nhẫn đã mang lại những thành công ban đầu này trong lĩnh vực tự động hóa. Bước phát triển tiếp theo trong lĩnh vực tự động hóa đòi hỏi sự ra đời của một lý thuyết về điều khiển tự động. Tiền thân của máy điều khiển số (NC – numerically controlled machine) dùng trong sản xuất tự động (ra đời vào thập niên 50 và 60 ở MIT) xuất hiện vào những năm đầu thế kỷ 19 với việc phát minh ra bộ điều khiển cấp thẳng (feed-forward control) khung máy dệt của Joseph Jacquard người Pháp. Vào những năm cuối thế kỷ 19, J.C Maxwell là người khởi xướng phát triển lý thuyết điều khiển thông qua việc phân tích một loạt các phương trình vi phân để mô tả máy điều tốc ly tâm [11]. Maxwell đã kiểm tra kết quả mà các thông số hệ thống khác nhau thể hiện qua hoạt động của hệ thống. Cùng thời gian đó, Vyshnegradskii đã đưa ra một lý thuyết toán học mới về máy điều chỉnh [12]. Vào những năm 1830, Michael Faraday đã mô tả định luật cảm ứng làm nền tảng cho động cơ điện và máy phát điện. Sau đó, vào thập niên 80 của thế kỷ 19, Nikola Tesla đã phát minh ra động cơ điện xoay chiều. Ý tưởng cơ bản của việc điều khiển hệ cơ khí một cách tự động được xác lập vững chắc vào cuối thế kỉ 19. Sự phát triển của tự động hóa đã thực sự bùng bổ vào thế kỷ 20.
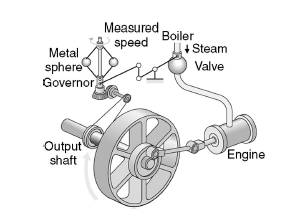
HÌNH 1.3 Máy điều tốc ly tâm
(Theo Modern Control Systems, 9th ed., R. C. Dorf and R. H. Bishop, Prentice- Hall, 2001)
Vào những năm 1930, các bộ điều khiển khí nén đã được phát triển và được ứng dụng trong quá trình công nghiệp. Tuy nhiên, trước năm 1940, việc thiết kế các hệ điều khiển vẫn giữ nguyên theo cách được đặc trưng bởi phương pháp thử-sai. Trong suốt thập niên 1940, những tiến bộ không ngừng trong phương pháp giải tích và toán học đã giúp củng cố thêm các quan niệm về kỹ thuật điều khiển như một nguyên lý kỹ thuật độc lập. Ở Hoa Kỳ, sự phát triển của mạng điện thoại và máy khuyếch đại điện tử có phản hồi đã khuyến khích Bode, Nyquist và Black ứng dụng các bộ phận có phản hồi trong phòng nghiên cứu điện thoại Bell [13-17]. Việc vận hành máy khuyếch đại có phản hồi được mô tả trong miền tần số và những quy trình kỹ thuật trong thiết kế và phân tích tiếp sau đó giờ đây được xem là “điều khiển cổ điển”. Cùng thời gian đó, lý thuyết điều khiển cũng đang được phát triển ở Nga và Đông Âu. Các nhà toán học và các nhà cơ học ứng dụng ở Liên Bang Xô Viết cũ là những người đi đầu trong lĩnh vực điều khiển. Họ đã tập trung nghiên cứu để đưa ra các công thức miền thời gian và các mô hình phương trình vi phân của hệ thống. Vào những năm 1960 đã xuất hiện những tiến bộ hơn nữa trong việc lập công thức miền thời gian bằng cách dùng hệ thống biến trạng thái. Những tiến bộ này đã dẫn đến những quy trình thiết kế và phân tích mà giờ đây được xem là “điều khiển hiện đại”.
Thế chiến thứ 2 đã đem đến những bước tiến xa hơn nữa trong lý thuyết và thực tiễn của điều khiển tự động thể hiện ở việc thiết kế và xây dựng các hệ điều khiển máy bay tự động, hệ thống định vị, hệ thống điều khiển anten rađa, và các hệ thống quân sự khác. Sự vận hành phức tạp của những hệ thống quân sự này đòi hỏi sự phát triển của công nghệ điều khiển và chúng đã thu hút được sự quan tâm của giới khoa học đối với hệ điều khiển và việc phát triển những phương pháp điều khiển mới. Sau thế chiến thứ 2, phương pháp miền tần số vẫn tiếp tục đóng vai trò chủ đạo trong lĩnh vực điều khiển với việc tăng cường ứng dụng biến đổi Laplace và phương pháp mặt phẳng S, điển hình là việc thiết kế hệ thống điều khiển sử dụng quỹ đạo nghiệm.
Trên phương diện kinh tế, do sự thôi thúc của việc giảm chi phí thông qua sản xuất hàng loạt, việc ứng dụng tự động hóa trong quá trình sản xuất đã được ưu tiên hàng đầu kể từ những năm 1940. Trong thập niên 50, sự phát minh ra cam, thanh liên kết, và dây đai trở thành những công nghệ chính cho việc tìm ra các sản phẩm mới cũng như việc sản xuất, lắp ráp với độ chính xác cao về tốc độ. Điển hình là sự ra đời của máy dệt, máy in và máy khâu. Việc sản xuất với độ chính xác cao về khối lượng đã trở thành hiện thực trong giai đoạn này. Máy sản xuất thùng các tông tự động áp dụng quy trình sheet-fed trong đó bìa các tông được cắt thành hình cánh quạt để tạo thành mặt xung quanh của thùng và được quấn quanh một trục. Các vết cắt sau đó được gắn liền lại bằng nhiệt. Một tấm các tông khác được cắt thành từng tấm nhỏ để tạo thành mặt đáy của thùng các tông. Tấm bìa các tông này được tạo thành hình đĩa bằng các thao tác rạch khía và gấp nếp trong một cái khuôn rập. Sau đó các tấm bìa các tông được ghép thành vỏ thùng có hình chén. Các gờ của vỏ thùng được uốn vào bên trong lên trên gờ mặt đáy của thùng và sau đó được gắn lại ở nhiệt độ cao để chống rò rỉ và tạo độ phẳng cho gờ để thùng có thể đứng được. Miệng thùng được làm thành hình tròn để tạo độ cứng cần thiết. Tất các các thao tác này được thực hiện khi sản phẩm được chuyển từ giá đỡ này sang giá đỡ khác và sau đó được đưa ra ngoài. Một chiếc máy trung bình sản xuất được hơn 200 thùng mỗi phút. Việc sản xuất thùng các tông tự động không đòi hỏi bất kỳ một hệ phi cơ khí nào ngoại trừ một động cơ điện dùng để điều khiển một trục thẳng. các máy này điển hình cho máy dệt và máy chế biến giấy và chỉ cho chúng ta thấy rằng hệ thống tự động hóa thực sự phức tạp hơn các loại hệ thống tiền thân của nó.
Sự phát triển của bộ vi xử lý trong những năm cuối thập niên 1960 đã dẫn đến sự ra đời những phương thức điều khiển bằng máy tính ban đầu để xử lý và thiết kế sản phẩm. Ví dụ như máy điều khiển số NC và các hệ thống điều khiển máy bay. Tuy nhiên, các quy trình sản xuất về bản chất vẫn hoàn toàn là cơ khí. Các hệ tự động và điều khiển chỉ được áp dụng với như là một biện pháp sau cùng. Việc phóng tàu Sputnik và sự mở ra của thời đại vũ trụ đã tạo thêm một động lực mới cho sự phát triển không ngừng của hệ cơ khí tự động. Sự ra đời của tên lửa, tàu thăm dò vũ trụ đòi hỏi phải phát triển các hệ điều khiển phức tạp, có độ chính xác cao. Hơn nữa, cần phải tối thiểu hóa khối lượng vệ tinh (cụ thể là việc tối thiểu hóa lượng nhiên liệu cần thiết cho một hành trình) trong khi vẫn đảm bảo quy trình điều khiển một cách chính xác đã thúc đẩy sự phát triển của điều khiển tối ưu. Các phương pháp miền thời gian của Liapunov, Minorsky và các cộng sự cũng như lý thuyết điều khiển tối ưu của L.S. Pontryagin ở Liên Bang Xô Viết cũ và R.Bellman ở Hoa Kỳ rất phù hợp với sự phát triển không ngừng của máy tính tốc độ cao và các ngôn ngữ lập trình mới dùng trong khoa học.
Những thành tựu trong sản xuất bán dẫn và mạch tích hợp đem đến sự phát triển của một loạt các sản phẩm mới với sự kết hợp chặt chẽ giữa cơ khí và điện tử trong cùng một hệ thống đồng thời yêu cầu cả hai phần này phải đi liền với nhau để thực hiện chức năng của mình. Thuật ngữ Cơ điện tử do Yasakawa Electric đưa ra vào năm 1969 để mô tả những hệ thống như thế. Yasakawa đăng ký độc quyền thuật ngữ này vào năm 1972, nhưng sau đó khi thuật ngữ này được sử dụng rộng rãi trên thế giới, Yasakawa đã từ bỏ bản quyền của mình vào năm 1982 [1-3]. Ban đầu, Cơ điện tử dùng để chỉ các hệ thống chỉ có các thành phần cơ khí và điện tử – không yêu cầu sự tính toán. Ví dụ như cửa trượt tự động, máy bán hàng tự động, hệ thống mở cửa ga-ra.
Vào những năm cuối thập niên 70, Hiệp hội xúc tiến ngành công nghiệp máy móc của Nhật (the Japan Society for the Promotion of Machine Industry – JSPMI) đã phân chia sản phẩm Cơ điện tử thành 4 loại [1]:
- Loại I: Các sản phẩm cơ khí là chính với sự kết hợp của điện tử để nâng cao tính năng của chúng. Ví dụ như các công cụ máy được điều khiển số hoá và điều chỉnh tốc độ biến thiên trong máy sản xuất.
- Loại II: Các hệ cơ khí truyền thống với sự hiện đại hoá đáng kể các thiết bị bên trong bằng việc kết hợp điện tử. Giao diện người dùng bên ngoài không đổi. Ví dụ như máy khâu hiện đại và các hệ thống sản xuất tự động.
- Loại III: Các hệ thống giữ lại chức năng của hệ cơ khí truyền thống nhưng máy móc bên trong được thay thế bằng điện tử. Ví dụ như đồng hồ số hoá.
- Loại IV: Các sản phẩm được thiết kế nhờ các công nghệ cơ khí và điện tử tích hợp hỗ trợ nhau. Ví dụ như máy photocopy, máy làm khô và máy giặt thông minh, nồi cơm điện, và lò tự động.
Các công nghệ được ứng dụng trong mỗi loại sản phẩm Cơ điện tử đã cho thấy sự tiến bộ của các sản phẩm cơ điện cùng với sự phát triển của lý thuyết điều khiển, các công nghệ tính toán, và các bộ vi xử lý. Các sản phẩm loại I ứng dụng công nghệ servo, điện tử công suất, lý thuyết điều khiển. Các sản phẩm loại II ứng dụng khả năng của các thiết bị nhớ và tính toán, khả năng thiết kế mạch theo đơn đặt hàng. Các sản phẩm loại III dựa vào bộ vi xử lý và các mạch tích hợp để thay thế cho các hệ cơ khí. Cuối cùng, các sản phẩm loại IV đánh dấu sự khởi đầu thực sự của hệ Cơ điện tử, thông qua sự tích hợp của các hệ cơ khí và điện tử. Đến tận thập niên 70, sự phát triển bộ vi xử lý của tập đoàn Intel đã khiến cho việc kết hợp hệ máy tính với hệ cơ khí trở nên khả thi.
Sang thập niên 80, với sự ra đời của lý thuyết “điều khiển bền vững”, ranh giới phân chia giữa lý thuyết điều khiển cổ điển và hiện đại không còn nữa. Ngày nay, nhìn chung người ta đều thừa nhận rằng kỹ thuật điều khiển phải có sự kết hợp đồng bộ giữa miền thời gian và miền tần số trong phân tích và thiết kế hệ điều khiển. Cũng trong thập niên 80, việc ứng dụng máy tính số hóa, một bộ phận không thể thiếu của hệ điều khiển đã trở nên khá phổ biến. Ngày nay, trên toàn thế giới đã có hàng trăm nghìn máy tính điều khiển số [18,19]. Bất kể người ta công nhận định nghĩa Cơ điện tử nào đi chăng nữa, thì có một điều rõ ràng là Cơ điện tử hiện đại luôn coi tính toán là nhân tố trung tâm. Trên thực tế, bản chất của Cơ điện tử hiện đại và các sản phẩm thông minh chính là việc ứng dụng bộ vi xử lý nhằm điều chỉnh chính xác cơ năng và để thích nghi với những thay đổi của môi trường.
1.4 Sự phát triển của ôtô là một ví dụ điển hình cho hệ Cơ điện tử
Sự phát triển của Cơ điện tử hiện đại có thể được minh họa bằng sự phát triển của ôtô. Đến tận thập niên 1960, chỉ có rađiô là thiết bị điện tử đáng kể duy nhất trong ô tô. Tất các các chức năng khác thuần túy mang tính cơ khí hoặc điện ví dụ như động cơ khởi động và hệ thống nạp ắc quy. Không hề có một “hệ thống an toàn thông minh” nào, ngoại trừ việc tăng kích cỡ đệm giảm chấn và các phần tử kết cấu để bảo vệ hành khách trong trường hợp xảy ra tai nạn. Vào đầu thập niên 1960, dây an toàn ra đời nhằm tăng độ an toàn cho người sử dụng và được vận hành hoàn toàn cơ khí. Tất cả hệ thống động cơ được điều khiển bởi người lái và/hoặc các hệ điều khiển cơ khí khác. Chẳng hạn, trước khi có sự xuất hiện của các cảm biến và vi điều khiển, bộ phân phối cơ khí được dùng để lựa chọn buji đánh lửa khi hỗn hợp nhiên liệu-không khí được nén lại. Thời gian ấn định cho việc đốt cháy nhiên liệu chính là biến điều khiển. Quy trình đốt cháy được điều khiển cơ khí không phải là tối ưu đứng trên phương diện tiết kiệm nhiên liệu. Mô hình quá trình đốt cháy nhiên liệu chỉ ra rằng, để tăng hiệu quả nhiên liệu, tồn tại một thời điểm tối ưu để đốt nhiên liệu. Thời điểm này phụ thuộc vào tải, tốc độ, và các đại lượng có thể đo khác. Hệ thống đánh lửa điện tử là một trong những hệ Cơ điện tử đầu tiên được ứng dụng trong ngành công nghiệp ô tô vào cuối thập niên 1970. Hệ thống đánh lửa điện tử bao gồm bộ cảm biến vị trí trục khuỷu, bộ cảm biến vị trí trục cam, tốc độ luồng khí, vị trí van tiết lưu, tốc độ thay đổi vị trí van tiết lưu của bộ cảm biến, bộ vi điều khiển quyết định thời điểm buji đánh lửa. Những ứng dụng ban đầu chỉ gồm một cảm biến hiệu ứng Hall nhằm xác định một cách chính xác vị trí của rôto trong bộ phân phối. Những ứng dụng sau này đã loại bỏ hoàn toàn bộ phân phối và dùng trực tiếp bộ vi xử lý để điều khiển quá trình đốt cháy.
Vào cuối thập niên 1970, hệ thống phanh chống bó (ABS – Antilock Brake System) được ứng dụng trong các ô tô [20]. Hệ thống ABS hoạt động thông qua việc phát hiện ra hiện tượng khóa cứng của bất kỳ bánh xe nào, sau đó điều chỉnh áp suất thủy lực cần thiết để giảm thiểu hoặc loại bỏ sự trượt. Hệ thống điều khiển sức kéo (TCS – Traction Control System) được ứng dụng trong các ô tô vào cuối thập niên 1990. Hệ thống TCS hoạt động thông qua việc phát hiện ra sự trượt trong quá trình tăng tốc và sau đó điều chỉnh công suất truyền cho bánh xe đang trượt. Quá trình này đảm bảo cho xe có thể tăng tốc với vận tốc lớn nhất có thể với điều kiện về đường và xe cho trước. Hệ thống điều khiển động lực ô tô (VDC – Vehicle Dynamics Control) được ứng dụng trong ôtô vào cuối những năm 1990. VDC hoạt động tương tự TCS với việc thêm một cảm biến tốc độ lệch và cảm biến gia tốc ngang. Mục đích của bánh xe phát động được xác định bởi vị trí bánh lái và tiếp theo được so sánh với hướng thực tế của chuyển động. Sau đó, hệ thống TCS được kích hoạt để điều khiển công suất truyền cho bánh xe và điều khiển vận tốc ô tô cũng như giảm thiểu sự khác nhau giữa hướng bánh lái và hướng chuyển động của ô tô [20, 21]. Trong một số trường hợp, ABS được dùng để giảm tốc độ của ô tô để thực hiện việc điều khiển như mong muốn. Trong các ô tô hiện nay, các CPU 8, 16, hay 32-bit được dùng để vận hành các hệ điều khiển khác nhau. Bộ vi điều khiển này có bộ nhớ (EEPROM/EPROM), các đầu ra số và tương tự, các bộ biến đổi A/D, bộ điều chế độ rộng xung (PWM), các chức năng thời gian, ví dụ dùng để đếm sự kiện và đo độ rộng xung, các đầu ra ưu tiên, và trong một số trường hợp xử lý tín hiệu số. Bộ xử lý 32-bit được dùng để quản lý động cơ, điều khiển truyền động, và các túi khí; bộ xử lý 16-bit dùng cho ABS, TCS, VDC, cụm thiết bị, và các hệ thống điều hoà không khí; bộ xử lý 8-bit dùng cho điều khiển ghế, gương và các hệ thống nâng hạ cửa. Ngày nay, có khoảng 30 – 60 bộ vi điều khiển trong một chiếc ô tô. Điều này sẽ càng tăng lên nhờ việc môđun hóa các hệ cơ điện tử con trong tương lai.
Cơ điện tử đã trở thành yếu tố để phân biệt giữa các ô tô. Kể từ khi khái niệm cơ bản về động cơ đốt trong được đưa ra cách đây gần một thế kỷ, các điểm khác nhau trong thiết kế động cơ cho xe hơi không còn là dấu hiệu nhằm phân biệt các loại ôtô khác nhau. Trong những năm 1970, các nhà chế tạo Nhật Bản đã thành công trong việc tạo dựng một chỗ đứng vững chắc trên thị trường xe hơi Mỹ bằng việc chào bán các xe hơi nhỏ tiết kiệm năng lượng với chất lượng không thua kém các loại xe khác. Trong suốt thập niên 1980, chất lượng của xe là dấu hiệu phân biệt các sản phẩm. Trong những năm 1990, chất lượng và độ tin cậy của ô tô là những gì mà người tiêu dùng mong đợi từ phía các nhà sản xuất. Ngày nay, các đặc tính cơ điện tử trở thành dấu hiệu phân biệt sản phẩm trong những hệ cơ khí truyền thống này. Điều này được thúc đẩy hơn nữa bởi tỷ lệ giá trị thực hiện cao hơn của các thiết bị, nhu cầu của thị trường về các sản phẩm sáng tạo với những đặc tính thông minh, và bởi những cố gắng giảm chi phí sản xuất các sản phẩm thông qua việc tái thiết kế các phần cơ điện tử cấu thành. Do tốc độ dự báo tăng trưởng thấp (2 – 3%), các hãng chế tạo xe hơi đang ra sức nghiên cứu các đặc tính công nghệ cao giúp phân biệt sản phẩm của họ với sản phẩm của các hãng khác [22]. Lượng giao dịch trên thị trường các thiết bị điện tử ô tô ở Bắc Mỹ hiện đạt giá trị khoảng 20 tỷ $, và hy vọng sẽ đạt 28 tỷ $ vào năm 2004 [22]. Những ứng dụng mới của các hệ Cơ điện tử trong ngành công nghiệp ô tô bao gồm các ô tô bán tự động đến tự động hoàn toàn, hệ thống nâng cao độ an toàn, giảm thiểu tiêu hao, và các đặc tính khác như hệ thống dẫn đường thông minh, các hệ thống phanh điện không dùng thủy lực [23]. Một lĩnh vực tăng trưởng có ý nghĩa khác do tiếp cận thiết kế Cơ điện tử mang lại là hệ thống mạng không dây từ các trạm mặt đất và truyền thông giữa các xe hơi. Công nghệ viễn thông là sự kết hợp của hệ thống âm thanh, điện thoại cầm tay, hệ thống điều hướng, khả năng kết nối Internet, e-mail và nhận dạng giọng nói, có thể được coi là lĩnh vực có tiềm năng lớn nhất trong ngành công nghiệp ôtô. Trên thực tế, việc ứng dụng điện tử trong sản xuất ô tô dự kiến sẽ tăng trung bình mỗi năm khoảng 6% trong vòng 5 năm tới và cũng trong khoảng thời gian đó, các tính năng điện tử trong ô tô cũng sẽ tăng gấp đôi [24].
Hệ vi cơ điện tử (MEMS – Micro Electromechanical System) là một công nghệ cho phép phát triển các bộ cảm biến và cơ cấu chấp hành có hiệu quả kinh tế nhằm phục vụ cho các ứng dụng Cơ điện tử. Thực tế, đã có một vài thiết bị MEMS được ứng dụng trong ô tô, ví dụ như cảm biến và cơ cấu chấp hành của túi khí, cảm biến áp suất dùng cho việc đo áp suất trong ống phân phối. Việc tích hợp các thiết bị MEMS với các mạch trạng thái tín hiệu CMOS trên cùng một chip bán dẫn là một ví dụ khác về sự phát triển của các công nghệ cho phép cải tiến các sản phẩm Cơ điện tử, chẳng hạn như ôtô.
Công nghệ ra-đa với sóng milimét (mm) gần đây cũng đã được ứng dụng trong ô tô. Ra-đa với sóng mm cho phép phát hiện vị trí của các đối tượng (các ô tô khác) và xác định khoảng cách tới chướng ngại vật cũng như tốc độ theo thời gian thực. Một mô tả khá chi tiết về cách thức vận hành của một hệ thống như thế đã được Suzuki và các cộng sự đưa ra [25]. Hình 1.4 minh họa khả năng nhận biết của ôtô nhờ sự trợ giúp của ra đa sóng mm. Công nghệ này cho phép điều chỉnh khoảng cách giữa ô tô và chướng ngại vật (hoặc ô tô khác) bằng việc kết hợp cảm biến với hệ thống dẫn hướng và ABS. Người lái có thể đặt vận tốc và khoảng cách mong muốn với những chiếc xe ở phía trước. Hệ thống ABS và hệ thống dẫn hướng được ghép với nhau để đảm bảo thực hiện được những chức năng nói trên một cách an toàn. Khả năng tránh chướng ngại vật còn được mở rộng thêm một chức năng khá hợp lý nữa là lái bán tự động ở tốc độ chậm nhằm duy trì khoảng cách với xe ở phía trước khi xảy ra tắc đường. Trong điều kiện phát triển của Cơ điện tử như ngày nay, những chiếc xe hơi hoàn toàn tự động chắc chắn sẽ ra đời trong vòng 20 năm tới. Các cuộc nghiên cứu về ô tô bán tự động dùng mô hình giao thông liên tục dựa trên hệ thống GPS và quá trình tự động hoá việc dừng và đi nhằm xác lập các hướng đi đang diễn ra ở khắp các trung tâm nghiên cứu. Hệ thống nhận biết và điều khiển được đề xuất cho loại xe như vậy, xem hình 1.5, có sự tham gia của hệ thống định vị toàn cầu vi phân (DGPS-differential global positioning systems), xử lý ảnh theo thời gian thực và xác lập hướng đi linh hoạt [26].
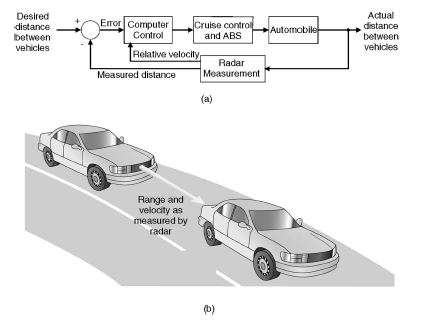
HÌNH 1.4 Sử dụng rada để đo khoảng cách và vận tốc nhằm tự động điều chỉnh khoảng cách giữa các xe ôtô
(Sửa theo Modern Control Systems, 9th ed., R. C. Dorf and R. H. Bishop, Prentice-Hall, 2001)
Các hệ Cơ điện tử tương lai trong ô tô có thể bao gồm kính chắn gió không mờ dựa trên hệ thống nhận biết độ ẩm, nhiệt độ và điều hoà không khí, khả năng tự đỗ xe song song. thiết bị trợ giúp đỗ xe phía sau, hỗ trợ thay đổi làn xe, phanh điện tử và việc thay thế các hệ thống thuỷ lực bằng các hệ cơ điện servo. Khi lượng ô tô trên thế giới tăng lên, các tiêu chuẩn nghiêm ngặt hơn về khí thải sẽ ra đời. Các sản phẩm Cơ điện tử sẽ có khả năng đáp ứng được những thách thức đặt ra đối với việc điều chỉnh lượng khí thải và hiệu suất động cơ bằng việc giảm đáng kể lượng khí thải CO, NO và HC và tăng hiệu quả của xe [23]. Rõ ràng là không thể coi một chiếc ô tô với 30 đến 60 bộ vi điều khiển, 100 động cơ điện, hệ thống dây điện nặng 200 pound, vô số các cảm biến và hàng nghìn dòng mã lệnh là một hệ cơ khí thuần tuý. Ô tô đang được chuyển hoá thành một hệ Cơ điện tử hoàn toàn.

HÌNH 1.5 Thiết kế hệ thống ôtô tự hành với các cảm biến và cơ cấu chấp hành
1.5 Cơ điện tử là gì và tương lai của Cơ điện tử?
Thuật ngữ Cơ điện tử ra đời ở Nhật Bản vào thập niên 1970 và đã trải qua một quá trình phát triển trong suốt 25 năm qua với sự ra đời của hàng loạt các sản phẩm thông minh. Vậy Cơ điện tử là gì? Nó là một giai đoạn tự nhiên trong quá trình phát triển của kỹ thuật hiện đại. Đối với một số kỹ sư, Cơ điện tử không còn mấy xa lạ và đối với những người khác nó lại là một phương thức tiếp cận mang tính triết học nhằm phục vụ cho hoạt động của họ. Tất nhiên, Cơ điện tử là một quá trình phát triển chứ không phải là một cuộc cách mạng. Rõ ràng là không thể có được một định nghĩa toàn diện về Cơ điện tử, nhưng trên thực tế lại rất cần có một định nghĩa như vậy. Tuy nhiên, có thể hiểu rằng Cơ điện tử là sự tích hợp các hệ cơ khí, điện và máy tính. Cần thấy rằng Cơ điện tử liên quan đến rất nhiều ngành bằng việc mô tả các phần cấu thành Cơ điện tử, bao gồm (i) mô hình hệ vật lý, (ii) cảm biến và cơ cấu chấp hành, (iii) tín hiệu và hệ thống, (iv) máy tính và hệ logic, (v) phần mềm và thu thập dữ liệu. Các nhà khoa học và các kỹ sư từ tất cả các tầng lớp xã hội và các lĩnh vực nghiên cứu khác nhau đều có thể góp sức mình cho sự phát triển của Cơ điện tử. Khi ranh giới giữa kỹ thuật và khoa học trở lên ít rõ ràng hơn, rất nhiều sinh viên muốn tìm kiếm một chương trình học mang tính đa ngành. Vì vậy, giới hàn lâm cần hướng tới việc đưa ra một môn học có liên quan đến các hệ Cơ điện tử.
Trong tương lai, sự phát triển của hệ Cơ điện tử sẽ được thúc đẩy bởi sự phát triển của các lĩnh vực có liên quan. Những tiến bộ trong lĩnh vực truyền thống cũng sẽ tạo động lực cho sự phát triển của hệ Cơ điện tử thông qua việc cung cấp những “công nghệ phụ trợ”. Chẳng hạn, việc phát minh ra bộ vi xử lý đã có ảnh hưởng sâu rộng đến quá trình tái thiết kế hệ cơ khí và quá trình thiết kế mới hệ Cơ điện tử. Chúng ta nên hy vọng vào những tiến bộ không ngừng của bộ vi xử lý và bộ vi điều khiển, sự phát triển của bộ cảm biến và cơ cấu chấp hành dựa trên việc ứng dụng những tiến bộ của hệ MEMS, các phương pháp luận điều khiển thích nghi và phương pháp lập trình tốc độ xử lý của máy tính, công nghệ mạng và công nghệ không dây, công nghệ CAE (Computer Aided Engineering – Kỹ thuật được trợ giúp bởi máy tính) dùng cho việc lập mô hình hệ thống tiên tiến, tạo mẫu ảo và thử nghiệm. Sự phát triển nhanh chóng trong những ngành này sẽ giúp tăng tốc độ phát triển các sản phẩm thông minh. Mạng Internet là một công nghệ khi được ứng dụng kết hợp với công nghệ không dây cũng sẽ tạo ra những sản phẩm Cơ điện tử mới. Trong khi những phát triển trong máy móc tự động cung cấp cho chúng ta những ví dụ sinh động về sự phát triển của Cơ điện tử, thì có hàng loạt các ví dụ về các hệ thống thông minh trong tất cả các lĩnh vực của đời sống xã hội, bao gồm thiết bị gia dụng thông minh như máy giặt, máy hút bụi, lò vi sóng và các thiết bị ứng dụng mạng không dây. Trong lĩnh vực “máy móc thân thiện với con người”( thuật ngữ do H.Kobayashi[27] đưa ra), chúng ta có thể hy vọng vào những tiến bộ trong phẫu thuật có sự trợ giúp của người máy và bộ cảm biến, cơ cấu chấp hành có thể cấy ghép được. Những tiến bộ trong lĩnh vực Cơ điện tử có thể đem lại lợi ích cho những lĩnh vực khác như người máy, sản xuất, vũ trụ, công nghệ và vận tải. Tương lai của Cơ điện tử đang rộng mở.
Tài liệu tham khảo
- Kyura, N. and Oho, H., “Mechatronics—an industrial perspective,” IEEE/ASME Transactions on Mechatronics, 1, No. 1, 1996, pp. 10–15.
- Mori, T., “Mechatronics,” Yasakawa Internal Trademark Application Memo 21.131.01, July 12, 1969.
- Harshama, F., Tomizuka, M., and Fukuda, T., “Mechatronics—What is it, why, and how?—an editorial,” IEEE/ASME Transactions on Mechatronics, 1, No. 1, 1996, pp. 1–4.
- Auslander, D. M. and Kempf, C. J., Mechatronics: Mechanical System Interfacing, Prentice-Hall, Upper Saddle River, NJ, 1996.
- Shetty, D. and Kolk, R. A., Mechatronic System Design, PWS Publishing Company, Boston, MA, 1997.
- Bolton, W., Mechatronics: Electrical Control Systems in Mechanical and Electrical Engineering, 2nd Ed.,Addison-Wesley Longman, Harlow, England, 1999.
- Mayr, I. O., The Origins of Feedback Control, MIT Press, Cambridge, MA, 1970.
- Tomkinson, D. and Horne, J., Mechatronics Engineering, McGraw-Hill, New York, 1996.
- Popov, E. P., The Dynamics of Automatic Control Systems; Gostekhizdat, Moscow, 1956; Addison-Wesley, Reading, MA, 1962.
- Dorf, R. C. and Bishop, R. H., Modern Control Systems, 9th Ed., Prentice-Hall, Upper Saddle River, NJ, 2000.
- Maxwell, J. C., “On governors,” Royal Soc. London, 16, 1868; in Selected Papers on Mathematical Trends in Control Theory, Dover, New York, 1964, pp. 270–283.
- Vyshnegradskii, I. A., “On controllers of direct action,” SPB Tekhnotog. Inst., 1877.
- Bode, H. W., “Feedback—the history of an idea,” in Selected Papers on Mathematical Trends in Control Theory, Dover, New York, 1964, pp. 106–123.
- Black, H. S., “Inventing the Negative Feedback Amplifier,” IEEE Spectrum, December 1977, pp. 55–60.
- Brittain, J. E., Turning Points in American Electrical History, IEEE Press, New York, 1977.
- Fagen, M. D., A History of Engineering and Science on the Bell Systems, Bell Telephone Laboratories, 1978.
- Newton, G., Gould, L., and Kaiser, J., Analytical Design of Linear Feedback Control, John Wiley & Sons, New York, 1957.
- Dorf, R. C. and Kusiak, A., Handbook of Automation and Manufacturing, John Wiley & Sons, New York, 1994.
- Dorf, R. C., The Encyclopedia of Robotics, John Wiley & Sons, New York, 1988.
- Asami, K., Nomura, Y., and Naganawa, T., “Traction Control (TRC) System for 1987 Toyota Crown, 1989,” ABS-TCS-VDC Where Will the Technology Lead Us? Mack, ed., Society of Automotive Engineers, Warrendale PA, 1996.
- Pastor, S. et al., “Brake Control System,” United States Patent # 5,720,533, Feb. 24, 1998 (see http://uspto.gov/ for more information).
- Jorgensen, B., “Shifting gears,” Auto Electronics, Electronic Business, 2001.
- Barron, M. B. and Powers, W. F., “The role of electronic controls for future automotive mechatronic systems,” IEEE/ASME Transactions on Mechatronics, 1, No. 1, 1996, pp. 80–88.
- Kobe, G., “Electronics: What’s driving the growth?” Automotive Industries, August 2000.
- Suzuki, H., Hiroshi, M. Shono, and Isaji, O., “Radar Apparatus for Detecting a Distance/Velocity,” United States Patent # 5,677,695, Oct 14, 1997 (see http://www.uspto.gov/ for more information).
- Ramasubramanian, M. K., “Mechatronics—the future of mechanical engineering-past, present, and a vision for the future,” (Invited paper), SPIE, Vol. 4334-34, March 2001.
- Kobayashi, H. (Guest Editorial), IEEE/ASME Transactions on Mechatronics, 2, No. 4, 1997, p. 217.
Audio
Bo mạch Stereo 2*15W Ampli Class D
Audio
Module DAC 24bit/192kHz cao cấp PCM1794
Audio
Module khuếch đại âm thanh PAM8610 10Wx2
Audio
Ampli classD stereo 25W – TPA3100D2
Audio
Module led nháy theo nhạc 16×2 (stereo)
Audio
NEXTRON chân đế IC DIP8
Audio
ON Semiconductor LM317 chính hãng
Nổi bật
Điều khiển học lệnh từ xa hồng ngoại CHUNGHOP