Cơ điện tử
Chương 2. Cách tiếp cận thiết kế cơ điện tử

Th3
2.5 Quy trình thiết kế đồng thời cho các hệ cơ điện tử
Việc thiết kế các hệ cơ điện tử đòi hỏi một sự phát triển mang tính hệ thống và việc sử dụng các công cụ thiết kế hiện đại.
Các bước thiết kế
Bảng 2.3 chỉ ra 5 bước phát triển quan trọng đối với các hệ cơ điện tử, bắt đầu từ một hệ cơ khí thuần tuý đến một hệ cơ điện tử tích hợp hoàn chỉnh. Phụ thuộc vào loại hình hệ thống cơ khí, mức độ của các bước phát triển đơn lẻ là khác nhau. Với các thiết bị cơ khí chính xác, người ta có thể
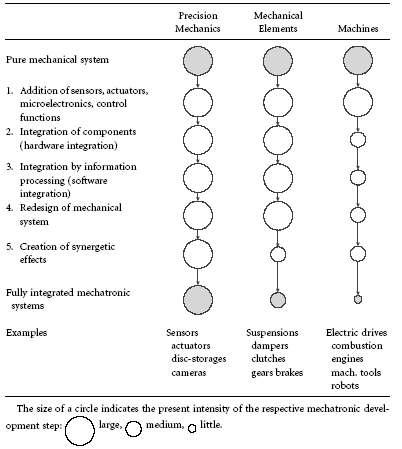
BẢNG 2.3 Các bước thiết kế hệ Cơ điện tử
cho ra đời một hệ cơ điện tử tương đối tích hợp. Ảnh hưởng của điện tử đến các bộ phận cơ khí có thể được như mong muốn, như bộ giảm chấn thích nghi, hệ thống phanh chống bó, và các hộp số tự động. Tuy nhiên, để hoàn chỉnh các máy và phương tiện, trước hết phải chỉ ra các thiết kế cơ điện tử của các bộ phận cấu thành và sau đó từ từ tái thiết kế các phần trong cấu trúc tổng thể như có thể thấy khi phát triển các máy công cụ, robot, và các phần của phương tiện.
Các công cụ CAD/CAE cần thiết
Việc phát triển các hệ cơ điện tử có sự trợ giúp của máy tính bao gồm:
- Mô tả cấu trúc trong giai đoạn phát triển kỹ thuật bằng cách dùng các công cụ CAD và CAE
- Xây dựng mô hình nhằm nhận được các mô hình tĩnh và động của quá trình
- Chuyển thành mã máy tính để mô phỏng hệ thống
- Lập trình và thực thi phần mềm cơ điện tử cuối cùng.
Một số công cụ phần mềm được mô tả trong phần [31]. Có một loạt các công cụ CAD/CAE dùng cho thiết kế cơ khí 2D và 3D, như Auto CAD với kết nối trực tiếp tới CAM (computer-aided manufacturing), và PADS, dùng cho thiết kế bo mạch in, đa lớp. Tuy nhiên, việc mô hình hóa có trợ giúp của máy tính là chưa hoàn hảo. Các ngôn ngữ hướng đối tượng như DYMOLA và MOBILE dùng cho việc mô hình hóa các hệ thống phức tạp được mô tả trong [31-33]. Những ngôn ngữ này dựa trên các phương trình vi phân thường, các phương trình đại số và các hàm rời rạc đã được chỉ ra. Một mô tả gần đây về việc thiết kế hệ điều khiển với sự trợ giúp của máy tính có thể tìm thấy trong [34]. Để mô phỏng hệ thống (và thiết kế bộ điều khiển), có nhiều chương trình khác nhau như ACSL, SIMPACK, MATLAB/SIMULINK, và MATRIX-X. Các kỹ thuật mô phỏng này là các công cụ hữu ích cho thiết kế, chúng cho phép nhà thiết kế nghiên cứu tương tác của các thành phần với sự thay đổi của các thông số thiết kế trước khi đưa vào sản xuất. Nói chung, chúng không thích hợp cho mô phỏng thời gian thực.
Qui trình mô hình hóa
Các mô hình toán học của quá trình cho ứng xử tĩnh và động được yêu cầu cho các bước khác nhau khi thiết kế hệ cơ điện tử như mô phỏng, thiết kế điều khiển, và khôi phục các biến. Hai cách để thu được các mô hình này là mô hình hóa theo lý thuyết dựa trên những nguyên tắc (vật lý) cơ bản và mô hình hóa theo thực nghiệm (nhận dạng) với các biến số đầu vào và đầu ra đo được. Một vấn đề cơ bản trong mô hình lý thuyết của các hệ cơ điện tử là các thành phần bắt nguồn từ nhiều lĩnh vực khác nhau. Ở đó tồn tại một kiến thức riêng biệt cho việc mô hình hóa các mạch điện, các cơ hệ nhiều vật, hoặc các hệ thuỷ lực, và các phần mềm tương ứng. Tuy nhiên, hiện vẫn chưa có được một phương pháp luận với sự trợ giúp của máy tính chung cho việc mô hình hóa và mô phỏng các thành phần của các lĩnh vực khác nhau [35].
Các nguyên tắc cơ bản của việc mô hình hóa theo lý thuyết cho hệ thống có dòng năng lượng đã được biết đến và có thể được thống nhất cho các thành phần của nhiều lĩnh vực khác nhau như điện, cơ khí, và nhiệt (xem [36-41]). Phương pháp luận của việc mô hình hóa trở nên phức tạp hơn đối với dòng chất lỏng, các quá trình nhiệt động lực học và hoá học.
Một qui trình chung cho việc mô hình hóa theo lý thuyết của các quá trình với tham số tập trung có thể được tóm tắt như sau:
- Xác định các dòng
- Dòng năng lượng (độ dẫn điện, cơ, nhiệt)
- Dòng năng lượng và dòng vật chất (lỏng, truyền nhiệt, nhiệt động lực, hoá học)
- Xác định các yếu tố quá trình: các biểu đồ tiến trình
- Nguồn, phần tử tiêu thụ (tiêu hao)
- Các yếu tố tích lũy, các bộ truyền và các bộ biến đổi
- Biểu diễn mô hình quá trình dưới dạng biểu đồ
- Sơ đồ đa cổng (các đầu cuối, dòng, thế, hay các biến chéo và biến xuyên qua (across and through variables))
- Sơ đồ khối cho dòng tín hiệu
- Biểu đồ liên kết cho dòng năng lượng
- Thiết lập các phương trình cho tất cả các yếu tố quá trình
- Các phương trình cân bằng cho yếu tố tích lũy (khối lượng, năng lượng, động lượng)
- Các phương trình cơ bản cho các yếu tố quá trình (nguồn, bộ chuyển đổi, bộ biến đổi)
- Các định luật của các hiện tượng trong các quá trình không thuận nghịch (các hệ tiêu hao: tiêu thụ)
- Các phương trình liên kết cho các yếu tố quá trình
- Phương trình liên tục cho các liên kết song song (định luật nút)
- Phương trình tương thích cho liên kết chuỗi (định luật mạch kín)
- Tính toán mô hình tổng thể của quá trình
- Thiết lập các biến đầu ra và đầu vào
- Mô tả không gian trạng thái
- Mô hình đầu ra/đầu vào (các phương trình vi phân, các hàm truyền)
Một ví dụ với các bước 1 – 3 cho một ô tô điều khiển bằng điện được đưa ra trên hình 2.7. Một phương pháp thống nhất cho các quá trình có dòng năng lượng đã được áp dụng đối với quy trình điện, cơ khí và thuỷ lực có chất lỏng không thể nén được. Bảng 2.4 chỉ ra các biến chéo và biến xuyên qua tổng quát.
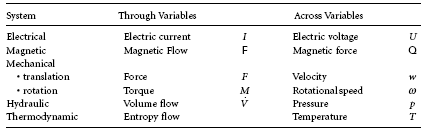 BẢNG 2.4 Các biến chéo và biến xuyên qua tổng quát cho các quá trình có dòng năng lượng
BẢNG 2.4 Các biến chéo và biến xuyên qua tổng quát cho các quá trình có dòng năng lượng

HÌNH 2.7 Các sơ đồ khác nhau của một ôtô:
(a) Sơ đồ các phần (bản đồ cấu trúc), (b) Sơ đồ dòng năng lượng (được đơn giản hoá), (c) Sơ đồ đa cổng với các dòng và các thế, (d) Sơ đồ tín hiệu dòng cho các cổng.
Trong những trường hợp này, giá trị của biến chéo và biến xuyên qua là năng lượng. Sự thống nhất này cho phép thiết lập công thức cho việc lập mô hình biểu đồ liên kết chuẩn [39]. Tương tự, đối với các quá trình thuỷ lực có chất lỏng nén được và quá trình nhiệt, những biến này được xác định nghĩa để đưa ra năng lượng, như thấy ở bảng 2.4. Tuy nhiên, trong thực tiễn kỹ thuật, người ta không sử dụng dòng khối lượng và dòng nhiệt. Nếu các biến này được sử dụng sẽ dẫn ra những biểu đồ liên kết giả với những định luật đặc biệt, bỏ qua tính đơn giản của các biểu đồ liên kết chuẩn. Biểu đồ liên kết dẫn tới một sự trừu tượng hóa mức cao, ít tính linh hoạt và cần nỗ lực nhiều hơn nữa để tạo ra các thuật toán mô phỏng. Vì vậy, chúng không phải là công cụ lý tưởng cho các hệ cơ điện tử [35]. Tương tự, thiết lập biểu đồ khối với những định nghĩa ban đầu về các khối đầu ra/đầu vào nhân quả là không phù hợp.
Sự phát triển theo mô hình hướng đối tượng là cách mà ở đó các đối tượng với các thiết bị đầu cuối được định nghĩa không với một quan hệ nhân quả trong trạng thái cơ bản này. Sau đó, các biểu đồ đối tượng được mô tả một cách trực quan, nhằm giữ lại một cách hiểu mang tính trực giác về thành phần vật lý cơ bản [43, 44]. Vì vậy, việc lập mô hình lý thuyết cho hệ cơ điện tử với một quy trình đồng nhất, rõ ràng và linh hoạt (từ các thành phần cơ bản thuộc các lĩnh vực khác nhau đến việc mô phỏng) là một thách thức cho sự phát triển xa hơn. Nhiều thành phần cho thấy ứng xử phi tuyến và các tính chất phi tuyến (ma sát và khe hở). Đối với những phần phức tạp hơn của quá trình, các ánh xạ đa chiều (ví dụ như ứng xử của động cơ đốt trong, ứng xử của lốp xe) cần được tích hợp.
Để thẩm định các mô hình lý thuyết, có thể sử dụng một số phương pháp nhận dạng nổi tiếng như phân tích tương quan và đo đáp ứng tần số, hoặc phân tích Fourier và phân tích phổ. Do có một số thông số chưa biết hoặc thay đổi theo thời gian, phương pháp đánh giá thông số có thể được áp dụng cho cả mô hình thời gian liên tục và mô hình với thời gian rời rạc (đặc biệt với các mô hình tuyến tính theo các thông số) [42,45,46]. Để nhận dạng và xấp xỉ đặc các tính phi tuyến, đa chiều, các mạng trí tuệ nhân tạo có thể được triển khai cho các quá trình động lực phi tuyến [47].
Mô phỏng thời gian thực
Mô phỏng thời gian thực được áp dụng ngày càng nhiều trong thiết kế hệ cơ điện tử. Điều này đặc biệt đúng nếu quá trình, phần cứng, phần mềm được phát triển đồng thời nhằm tối thiểu hoá các vòng phát triển lặp cũng như rút ngắn khoảng thời gian đưa sản phẩm ra thị trường. Dựa trên tốc độ tính toán yêu cầu của phương pháp mô phỏng, mô phỏng thời gian thực có thể được phân nhỏ thành:
- Mô phỏng không với giới hạn thời gian (cứng)
- Mô phỏng thời gian thực, và
- Mô phỏng nhanh hơn thời gian thực
Một số ví dụ áp dụng có thể thấy trên hình 2.8. Ở đây, mô phỏng thời gian thực có nghĩa là việc mô phỏng một phần được thực hiện sao cho các tín hiệu đầu ra và đầu vào chỉ ra các giá trị phụ thuộc vào cùng thời gian như thành phần vận hành động lực học trong thực tế. Điều này sẽ trở thành vấn đề đối với các quá trình có động lực học nhanh hơn so với các thuật toán và tốc độ tính toán yêu cầu.
Hình 2.9 thể hiện các loại phương pháp mô phỏng thời gian thực khác nhau. Lý do yêu cầu thời gian thực chủ yếu là do một phần của hệ thống được nghiên cứu không phải là mô phỏng mà là thực. Những trường hợp như vậy có thể được phân biệt như sau:
- Quá trình thực có thể được vận hành cùng với điều khiển mô phỏng thông qua việc sử dụng phần cứng thay vì phần cứng cuối cùng. Quá trình này còn được gọi là “tạo mẫu điều khiển”.
- Quá trình mô phỏng có thể được vận hành kết hợp với phần cứng điều khiển thực hay còn gọi là “mô phỏng hardware-in-the-loop”.
- Quy trình mô phỏng được vận hành với điều khiển mô phỏng trong thời gian thực. Điều này có thể được đòi hỏi nếu không có phần hoàn chỉnh hoặc nếu muốn thực hiện bước thiết kế trước khi tiến hành mô phỏng hardware-in-the-loop.
Mô phỏng Hardware-in-the-Loop
Mô phỏng Hardware-in-the-loop (HIL) được đặc trưng bởi việc vận hành các thành phần thực kết hợp với các thành phần mô phỏng theo thời gian thực. Thường, phần cứng và phần mềm của hệ điều khiển là hệ thống thực như được dùng trong dây chuyền sản xuất. Quá trình được điều khiển (bao gồm các cơ cấu chấp hành, các quá trình vật lý và các cảm biến) có thể bao gồm cả các thành phần được mô phỏng hoặc các thành phần thực, như thấy ở hình 2.10(a). Nói chung, thường kết hợp thực hiện các trường hợp nêu trên. Thông thường, một số cơ cấu chấp hành là thực còn quá trình và các bộ cảm biến chỉ là mô phỏng. Lý do là cơ cấu chấp hành và phần cứng điều khiển thường là một hệ thống tích hợp con hoặc do cơ cấu chấp hành rất khó được mô hình hoá chính xác và mô phỏng trong khoảng thời gian thực. (Để kết hợp sử dụng các cảm biến thực cùng với
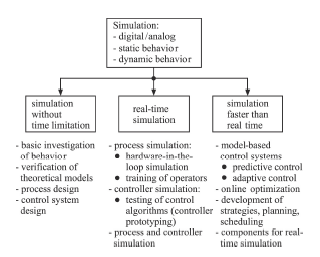 HÌNH 2.8 Phân loại của các phương pháp mô phỏng theo tốc độ và các ví dụ ứng dụng
HÌNH 2.8 Phân loại của các phương pháp mô phỏng theo tốc độ và các ví dụ ứng dụng
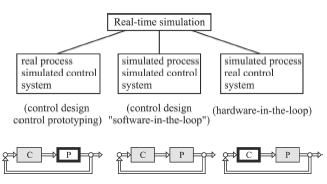 HÌNH 2.9 Phân loại mô phỏng thời gian thực
HÌNH 2.9 Phân loại mô phỏng thời gian thực
quá trình mô phỏng đòi hỏi phải cố gắng thực sự bởi đầu vào cảm biến vật lý không tồn tại mà phải được tạo ra một cách nhân tạo). Để thay đổi hoặc tái thiết kế một số chức năng của phần cứng hoặc phần mềm điều khiển, thiết bị phân dòng có thể được nối với phần cứng điều khiển cơ bản. Do vậy các bộ mô phỏng hardware-in-the-loop cũng bao gồm các chức năng điều khiển được mô phỏng riêng.
Nói chung, những ưu điểm của mô phỏng hardware-in-the-loop là:
- Thiết kế và thử nghiệm phần cứng, phần mềm điều khiển mà không cần vận hành một quá trình thực nào (“chuyển lĩnh vực xử lý vào phòng thí nghiệm”);
- Thử nghiệm phần cứng và phần mềm điều khiển ở điều kiện môi trường tới hạn trong phòng thí nghiệm (ví dụ, nhiệt độ cao/thấp, gia tốc lớn và các cú sốc cơ học, thiết bị kích thích, tính tương thích điện từ);
- Thử nghiệm các tác động của lỗi và tình trạng không mong đợi của cơ cấu chấp hành, cảm biến và máy tính trên toàn bộ hệ thống;
- Vận hành và thử nghiệm các điều kiện vận hành tới hạn và nguy hiểm;
- Các thử nghiệm tái sinh, có thể lặp lại thường xuyên ;
- Vận hành dễ dàng với các giao diện người-máy khác nhau (bộ điều khiển cho buồng tập lái máy bay); và
- Tiết kiệm chi phí và thời gian.


HÌNH 2.10 Mô phỏng thời gian thực:
Cấu trúc lai. (a) Mô phỏng Hardware-in-the-loop; (b) tạo mẫu điều khiển
Tạo mẫu điều khiển
Để thiết kế và thử nghiệm các hệ cơ điện tử phức tạp cũng như các thuật toán của chúng dưới sức ép thời gian thực, việc mô phỏng các bộ điều khiển theo thời gian thực kết hợp với phần cứng (ví dụ như các bộ xử lý tín hiệu có sẵn) thay vì với phần cứng thật (ví dụ như ASICS) có thể được thực hiện. Sau đó, quá trình, cơ cấu chấp hành và cảm biến sau đó có thể là thực. Đây được gọi là tạo mẫu điều khiển (hình 2.10(b)). Tuy nhiên, các phần của quá trình, hoặc cơ cấu chấp hành có thể được mô phỏng, dẫn đến sự kết hợp giữa mô phỏng HIL và việc tạo mẫu điều khiển. Ưu điểm của sự kết hợp này là:
- Những phát triển ban đầu của phương pháp xử lý tín hiệu, các mô hình quá trình và cấu trúc hệ thống điều khiển bao gồm các thuật toán có phần mềm cao cấp và phần cứng với tính năng cao có sẵn;
- Thử nghiệm quy trình xử lý tín hiệu và hệ thống điều khiển kết hợp với các thiết kế cơ cấu chấp hành, các phần của quá trình và cảm biến để tạo ra tác dụng hỗ trợ lẫn nhau;
- Giảm các mô hình và thuật toán nhằm giảm giá thành sản phẩm;
- Xác định các thông số kỹ thuật cho phần mềm và phần cứng cuối cùng
Một số ưu điểm của mô phỏng HIL cũng có giá trị cho việc tạo mẫu điều khiển. Một số tham khảo về mô phỏng thời gian thực là [48,49].
Tài liệu tham khảo
- Kyura, N. and Oho, H., Mechatronics—an industrial perspective. IEEE/ASME Transactions on Mechatronics, 1(1):10–15.
- Schweitzer, G., Mechatronik-Aufgaben und Lösungen. VDI-Berichte Nr. 787. VDI-Verlag, Düsseldorf, 1989.
- Ovaska, S. J., Electronics and information technology in high range elevator systems. Mechatronics, 2(1):89–99, 1992.
- IEEE/ASME Transactions on Mechatronics, 1996.
- Harashima, F., Tomizuka, M., and Fukuda, T., Mechatronics—“What is it, why and how?” An editorial. IEEE/ASME Transactions on Mechatronics, 1(1):1–4, 1996.
- Schweitzer, G., Mechatronics—a concept with examples in active magnetic bearings. Mechatronics,2(1):65–74, 1992.
- Gausemeier, J., Brexel, D., Frank, Th., and Humpert, A., Integrated product development. In Third Conf. Mechatronics and Robotics, Paderborn, Germany, Okt. 4–6, 1995. Teubner, Stuttgart, 1995.
- Isermann, R., Modeling and design methodology for mechatronic systems. IEEE/ASME Transactions on Mechatronics, 1(1):16–28, 1996.
- Mechatronics: An International Journal. Aims and Scope. Pergamon Press, Oxford, 1991.
- Mechatronics Systems Engineering: International Journal on Design and Application of Integrated Electromechanical Systems. Kluwer Academic Publishers, Nethol, 1993.
- IEE, Mechatronics: Designing intelligent machines. In IEE-Int. Conf. 12–13 Sep., Univ. of Cambridge, 1990.
- Hiller, M. (ed.), Second Conf. Mechatronics and Robotics. September 27–29, Duisburg/Moers, Germany, 1993. Moers, IMECH, 1993.
- Isermann, R. (ed.), Integrierte mechanisch elektroni-sche Systeme. March 2–3, Darmstadt, Germany, Fortschr.-Ber. VDI Reihe 12 Nr. 179. VDI-Verlag, Düsseldorf, 1993.
- Lückel, J. (ed.), Third Conf. Mechatronics and Robotics, Paderborn, Germany, Oct. 4–6, 1995. Teubner, Stuttgart, 1995.
- Kaynak, O., Özkan, M., Bekiroglu, N., and Tunay, I. (eds.), Recent advances in mechatronics. In Int. Conf. Recent Advances in Mechatronics, August 14–16, 1995,
- Istanbul, Turkey. Kitaura, K., Industrial mechatronics. New East Business Ltd., in Japanese, 1991.
- Bradley, D. A., Dawson, D., Burd, D., and Loader, A. J., Mechatronics-Electronics in Products and Processes. Chapman and Hall, London, 1991.
- McConaill, P. A., Drews, P., and Robrock, K. H., Mechatronics and Robotics I. IOS-Press, Amsterdam, 1991.
- Isermann, R., Mechatronische Systeme. Springer, Berlin, 1999.
- Isermann, R., Lachmann, K. H., and Matko, D., Adaptive Control Systems, Prentice-Hall, London, 1992.
- Isermann, R., Supervision, fault detection and fault diagnosis methods—advanced methods and applications. In XIV IMEKO World Congress, Vol. 1, pp. 1–28, Tampere, Finland, 1997.
- Isermann, R., Supervision, fault detection and fault diagnosis methods—an introduction, special section on supervision, fault detection and diagnosis. Control Engineering Practice, 5(5):639–652, 1997.
- Isermann, R. (ed.), Special section on supervision, fault detection and diagnosis. Control Engineering Practice, 5(5):1997. ©2002 CRC Press LLC
- Saridis, G. N., Self Organizing Control of Stochastic Systems. Marcel Dekker, New York, 1977.
- Saridis, G. N. and Valavanis, K. P., Analytical design of intelligent machines. Automatica, 24:123–133, 1988.
- Åström, K. J., Intelligent control. In European Control Conf., Grenoble, 1991.
- White, D. A. and Sofge, D. A. (eds.), Handbook of Intelligent Control. Van Norstrad, Reinhold, New York, 1992.
- Antaklis, P., Defining intelligent control. IEEE Control Systems, June: 4–66, 1994.
- Gupta, M. M. and Sinha, N. K., Intelligent Control Systems. IEEE-Press, New York, 1996.
- Harris, C. J. (ed.), Advances in Intelligent Control. Taylor & Francis, London, 1994.
- Otter, M. and Gruebel, G., Direct physical modeling and automatic code generation for mechatronics simulation. In 2nd Conf. Mechatronics and Robotics, Duisburg, Sep. 27–29, IMECH, Moers, 1993.
- Elmquist, H., Object-oriented modeling and automatic formula manipulation in Dymola, Scandin. Simul. Society SIMS, June, Kongsberg, 1993.
- Hiller, M., Modelling, simulation and control design for large and heavy manipulators. In Int. Conf. Recent Advances in Mechatronics. 1:78–85, Istanbul, Turkey, 1995.
- James, J., Cellier, F., Pang, G., Gray, J., and Mattson, S. E., The state of computer-aided control system design (CACSD). IEEE Transactions on Control Systems, Special Issue, April 6–7 (1995).
- Otter, M. and Elmqvist, H., Energy flow modeling of mechatronic systems via object diagrams. In 2nd MATHMOD, Vienna, 705–710, 1997.
- Paynter, H. M., Analysis and Design of Engineering Systems. MIT Press, Cambridge, 1961.
- MacFarlane, A. G. J., Engineering Systems Analysis. G. Harrop, Cambridge, 1964.
- Wellstead, P. E., Introduction to Physical System Modelling. Academic Press, London, 1979.
- Karnopp, D. C., Margolis, D. L., and Rosenberg, R. C., System Dynamics. A Unified Approach. Wiley, New York, 1990.
- Cellier, F. E., Continuous System Modelling. Springer, Berlin, 1991.
- Gawtrop, F. E. and Smith, L., Metamodelling: Bond Graphs and Dynamic Systems. Prentice-Hall, London, 1996.
- Eykhoff, P., System Identification. John Wiley & Sons, London, 1974.
- Elmqvist, H., A structured model language for large continuous systems. Ph.D. Dissertation, Report CODEN: LUTFD2/(TFRT-1015) Dept. of Aut. Control, Lund Institute of Technology, Sweden, 1978.
- Elmqvist, H. and Mattson, S. E., Simulator for dynamical systems using graphics and equations for modeling. IEEE Control Systems Magazine, 9(1):53–58, 1989.
- Isermann, R., Identifikation dynamischer Systeme. 2nd Ed., Vol. 1 and 2. Springer, Berlin, 1992.
- Ljung, L., System Identification: Theory for the User. Prentice-Hall, Englewood Cliffs, NJ, 1987.
- Isermann, R., Ernst, S., and Nelles, O., Identification with dynamic neural networks—architectures, comparisons, applications—Plenary. In IFAC Symp. System Identification (SYSID’97), Vol. 3, pp. 997–1022, Fukuoka, Japan, 1997.
- Hanselmann, H., Hardware-in-the-loop simulation as a standard approach for development, customization, and production test, SAE 930207, 1993.
- Isermann, R., Schaffnit, J., and Sinsel, S., Hardware-in-the-loop simulation for the design and testing of engine control systems. Control Engineering Practice, 7(7):643–653, 1999.
Audio
ON Semiconductor LM317 chính hãng
Audio
Mini Amp PAM8403 Stereo 3W kèm Volume
Nổi bật
Điều khiển học lệnh từ xa hồng ngoại CHUNGHOP
Audio
NEXTRON chân đế IC DIP8
Audio
Module khuếch đại âm thanh PAM8610 10Wx2
Audio
Module led nháy theo nhạc 16×2 (stereo)
Audio
Ampli classD stereo 25W – TPA3100D2
Audio
Module DAC 24bit/192kHz cao cấp PCM1794