Cơ điện tử
Chương 2. Cách tiếp cận thiết kế cơ điện tử

Th3
2.4 Các hệ thống xử lý thông tin (Kiến trúc cơ bản và các thỏa hiệp phần cứng/phần mềm)
Việc điều khiển các hệ cơ khí thường được thực hiện thông qua cơ cấu chấp hành nhằm thay đổi vị trí, tốc độ, dòng, lực, mômen và điện áp. Các đại lượng đầu ra có thể đo được trực tiếp thường là vị trí, tốc độ, gia tốc, lực và dòng điện.
Kiến trúc điều khiển đa tầng
Việc xử lý thông tin của các tín hiệu đầu vào, đầu ra đo được trực tiếp có thể được tổ chức ở một vài mức như hình 2.5
Mức 1: Điều khiển ở mức độ thấp cấp thẳng, phản hồi hệ số tắt dần, ổn định và tuyến tính hóa)
Mức 2: Điều khiển ở mức cao (các chiến lược điều khiển phản hồi cao cấp)
Mức 3: Giám sát bao gồm cả chẩn đoán lỗi
Mức 4: Tối ưu hoá, phối hợp (các quá trình)
Mức 5: Quản lý tổng thể quá trình
Những phương pháp xây dựng hệ cơ điện tử gần đây sử dụng việc xử lý tín hiệu ở mức thấp ví dụ như phản hồi hệ số tắt dần, điều khiển chuyển động hoặc giám sát ở mức giản đơn. Tuy nhiên, xử lý thông tin số cho phép giải quyết nhiều nhiệm vụ như điều khiển thích nghi, điều khiển học, giám sát với chẩn đoán lỗi, quyết định về vấn đề bảo dưỡng hoặc thậm chí về các hoạt động dự phòng, tối ưu hoá về mặt kinh tế và phối hợp các nhiệm vụ. Các nhiệm vụ ở cấp cao hơn đôi khi được gọi ngắn gọn là “quản lý quá trình”.

HÌNH 2.4 Các cách tích hợp trong hệ cơ điện tử
Xử lý tín hiệu riêng biệt
Các phương pháp đã được mô tả có thể áp dụng một phần cho các đại lượng không thể đo được được khôi phục từ các mô hình toán học của quá trình. Theo cách này, có thể điều khiển hệ số tắt dần, ứng suất nhiệt và vật liệu và sự trượt hoặc để giám sát các đại lượng như điện trở, điện dung, nhiệt độ của các thành phần hay các tham số hao mòn và ô nhiễm. Việc xử lý tín hiệu có thể đòi hỏi các bộ lọc riêng biệt để xác định biên độ và tần số dao động, để xác định các đại lượng được tích phân hay đạo hàm, hoặc các bộ quan sát biến trạng thái.
Các hệ điều khiển thích nghi và dựa trên mô hình
Ít nhất ở các mức thấp hơn, việc xử lý thông tin được thực hiện thông qua các thuật toán hoặc các mô-đun phần mềm đơn giản trong các trạng thái thời gian thực. Những thuật toán này bao gồm các thông số có khả năng điều chỉnh tự do, chúng phải được thích ứng với ứng xử tĩnh và động của quá trình. Đối lập với việc điều chỉnh bằng tay thông qua phương pháp thử và sai, việc sử dụng các mô hình toán học cho phép khả năng thích nghi tự động nhanh và chính xác.

HÌNH 2.5 Hệ thống tự động thông minh tiên tiến với nhiều cấp điều khiển, cơ sở hiểu biết,cơ chế suy luận và các giao diện
Các mô hình toán học có thể nhận được bằng việc nhận dạng và đánh giá tham số dùng các tín hiệu đầu vào, đầu ra được đo và lấy mẫu. Những phương pháp này không chỉ giới hạn cho các mô hình tuyến tính, mà còn cho phép áp dụng đối với một số lớp của hệ phi tuyến. Nếu các phương pháp đánh giá thông số được kết hợp với các phương pháp thiết kế theo thuật toán điều khiển thích hợp thì sẽ có các hệ điều khiển thích nghi. Chúng có thể được dùng cho việc điều chỉnh bộ điều khiển chính xác cố định hoặc chỉ cho các mục đích đặc biệt [20].
Giám sát và phát hiện lỗi
Với việc tăng số lượng các chức năng tự động, bao gồm các thành phần điện tử, các cảm biến và cơ cấu chấp hành, tăng độ phức tạp, và tăng các yêu cầu về độ tin cậy và an toàn, một bộ giám sát được tích hợp với chẩn đoán lỗi càng trở nên quan trọng hơn. Đây là một đặc tính tự nhiên quan trọng của hệ thống cơ điện tử thông minh. Hình 2.6 cho thấy một quá trình bị tác động bởi lỗi. Các lỗi này chỉ ra độ lệch không cho phép từ các trạng thái thông thường và có thể được sinh ra từ bên ngoài hoặc bên trong. Các lỗi bên ngoài có thể do nguồn cung cấp năng lượng, sự ô nhiễm hoặc va chạm trong khi các lỗi bên trong có thể do sự hao mòn, thiếu sự bôi trơn, hoặc các lỗi cơ cấu chấp hành hoặc cảm biến. Phương pháp phát hiện lỗi truyền thống là kiểm tra giá trị giới hạn của một vài biến có thể đo được. Tuy nhiên, các lỗi sơ khai và không liên tục thường không thể phát hiện ra và việc chẩn đoán lỗi bên trong không thể thực hiện được bằng phương pháp đơn giản này. Các phương pháp phát hiện và chẩn đoán lỗi dựa trên mô hình được phát triển trong những năm gần đây cho phép sớm phát hiện ra những lỗi nhỏ thông qua các tín hiệu đo được thông thường [21]. Dựa trên các tín hiệu đầu vào đo được, U(t), các tín hiệu đầu ra Y(t) và mô hình quá trình, các đặc tính được xác định bằng việc đánh giá các thông số, các quan sát của trạng thái và đầu ra, cũng như các phương trình cân bằng, như thấy ở hình 2.6.
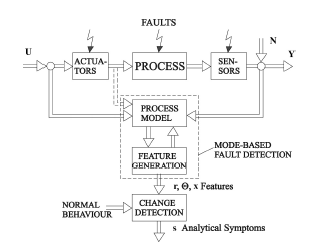
HÌNH 2.6 Sơ đồ phát hiện lỗi dựa trên mô hình
Sau đó, những số dư này được đem so sánh với những số dư của ứng xử thông thường và với các phương pháp phát hiện thay đổi sẽ nhận được các dấu hiệu giải tích. Khi đó, việc chẩn đoán lỗi sẽ được thực hiện bằng các phương pháp phân loại và lập luận. Chi tiết hơn xem trong [22,23].
Một ưu điểm đáng kể ở đây là cùng một mô hình xử lý có thể được sử dụng cho cả việc thiết kế bộ điều khiển (thích nghi) và phát hiện lỗi. Nói chung, các mô hình thời gian liên tục được ưa dùng hơn nếu việc phát hiện lỗi dựa trên việc đánh giá các thông số hoặc các phương trình cân bằng. Để phát hiện lỗi bằng việc đánh giá trạng thái hoặc phương trình cân bằng, có thể sử dụng mô hình thời gian rời rạc.
Giám sát và chẩn đoán lỗi hiện đại là một cơ sở để cải thiện độ tin cậy và an toàn, việc bảo dưỡng theo trạng thái, khởi động các dự phòng, và việc tái cấu hình.
Các hệ thống thông minh (các nhiệm vụ cơ bản)
Xử lý thông tin trong hệ thống cơ điện tử có thể đi từ các chức năng điều khiển đơn giản đến điều khiển thông minh. Đã có rất nhiều định nghĩa khác nhau về hệ thống điều khiển thông minh, xem [24-30]. Một hệ thống điều khiển thông minh có thể được tổ chức giống như hệ chuyên gia trực tuyến, xem hình 2.5, và bao gồm:
- Các chức năng đa điều khiển (các chức năng quản lý)
- Cơ sở kiến thức
- Cơ chế suy luận, và
- Giao diện truyền thông
Các chức năng điều khiển trực tuyến thường được tổ chức ở dạng đa cấp, như đã mô tả ở trên. Cơ sở kiến thức bao gồm kiến thức để định tính và định lượng. Phần định tính hoạt động với các mô hình giải tích (toán học) của quá trình, các phương pháp đánh giá trạng thái và tham số, phương pháp thiết kế bằng giải tích (ví dụ đối với điều khiển và phát hiện lỗi) và các phương pháp tối ưu hoá một cách định tính. Các mô đun tương tự chứa kiến thức để định lượng (ví dụ, các qui tắc cho tính toán mềm và mờ). Kiến thức nữa là các sự kiện quá khứ trong bộ nhớ và khả năng đoán trước ứng xử. Cuối cùng là có thể bao gồm cả các nhiệm vụ hoặc kế hoạch.
Cơ chế suy luận đưa ra kết luận hoặc bằng lập luận định lượng (ví dụ như các phương pháp Boolean) hoặc bằng lập luận định tính (ví dụ như các phương pháp dự đoán) và đưa ra các quyết định cho các chức năng quản lý.
Truyền thông giữa các mođun khác nhau, một cơ sở dữ liệu quản trị thông tin, và sự tương tác người-máy cần được thiết lập.
Dựa trên những chức năng này của hệ chuyên gia trực tuyến, một hệ thông minh có thể được xây dựng với khả năng “lập mô hình, lập luận và học quá trình cũng như các chức năng tự động hoá của nó trong một khuôn khổ định sẵn và khả năng tự điều khiển để hướng tới mục tiêu nhất định”. Vì vậy, hệ cơ điện tử thông minh có thể được xây dựng từ “những hệ thông minh bậc thấp” [13] như cơ cấu chấp hành thông minh đến “những hệ tương đối thông minh” như phương tiện lái tự động.
Một hệ cơ điện tử thông minh sẽ sửa bộ điều khiển cho hợp với ứng xử gần như phi tuyến (thích nghi), và lưu giữ các thông số điều khiển của nó theo vị trí và tải trọng (học), giám sát tất cả các thành phần liên quan và chẩn đoán lỗi (giám sát) để bảo dưỡng theo yêu cầu hoặc nếu có sự cố xảy ra thì yêu cầu một hoạt động an toàn (các quyết định dựa trên các hoạt động). Trong trường hợp đa thành phần, việc giám sát có thể giúp loại bỏ những thành phần bị lỗi và thực hiện tái cấu hình quá trình được điều khiển.
Audio
NEXTRON chân đế IC DIP8
Audio
Module khuếch đại âm thanh PAM8610 10Wx2
Audio
Module led nháy theo nhạc 16×2 (stereo)
Audio
ON Semiconductor LM317 chính hãng
Nổi bật
Điều khiển học lệnh từ xa hồng ngoại CHUNGHOP
Audio
Mini Amp PAM8403 Stereo 3W kèm Volume
Audio
Ampli classD stereo 25W – TPA3100D2
Audio
Bo mạch Stereo 2*15W Ampli Class D